


Механические и скоростные характеристики работы электродвигателя
Большое значение для характеристики работы электродвигателей имеет вращающий момент М, число оборотов n и ток в основной обмотке I, которые, как видно из выражений (4) и (5), определенным образом взаимосвязаны и зависят друг от друга. Эти величины изменяются при различных режимах работы электродвигателя.
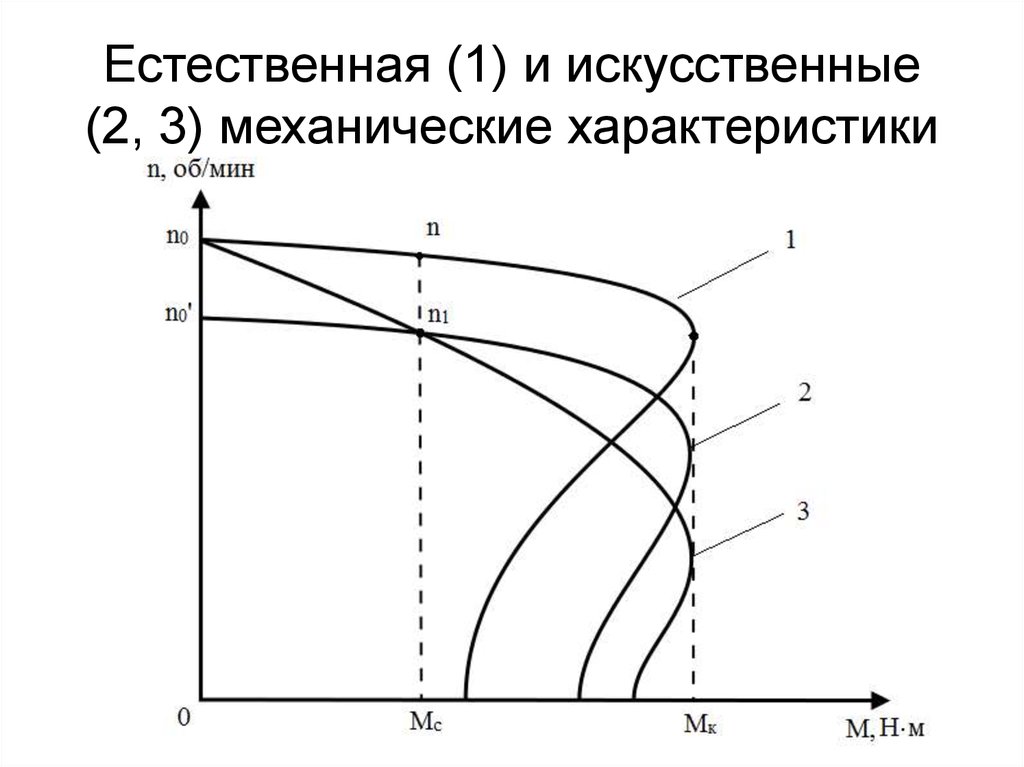
Принято графическую зависимость п = f(М) называть механической характеристикой, а зависимость п = f(I) — скоростной. Различают естественную и искусственную характеристики электродвигателей.
Под естественной или автоматической понимается такая механическая или скоростная характеристика, которую имеет электродвигатель при номинальных магнитном потоке и напряжении на зажимах якоря для машины постоянного тока и номинальном напряжении на статоре и замкнутой накоротко обмотке ротора для машин переменного тока и при отсутствии в цепи якоря (или ротора) дополнительных сопротивлений.
уменьшение или увеличение рабочего напряжения и т. д.) характеристики принято называть искусственными.
Механические характеристики электродвигателей принято изображать в системе координат п, М, а скоростные — в системе координат п, I. При принятых выше условиях о положительных направлениях I и III квадранты соответствуют двигательному режиму работы электродвигателя,
Как известно, у большинства электродвигателей вращающий момент и ток в обмотке якоря (или ротора) являются величинами взаимопропорциональными. Это позволяет совмещать в ряде случаев на одном чертеже при соответствующем выборе масштабов механическую и скоростную характеристики.
Говоря о механических характеристиках различных электродвигателей постоянного тока, следует помнить, что скоростные характеристики ничем от них по виду не отличаются.
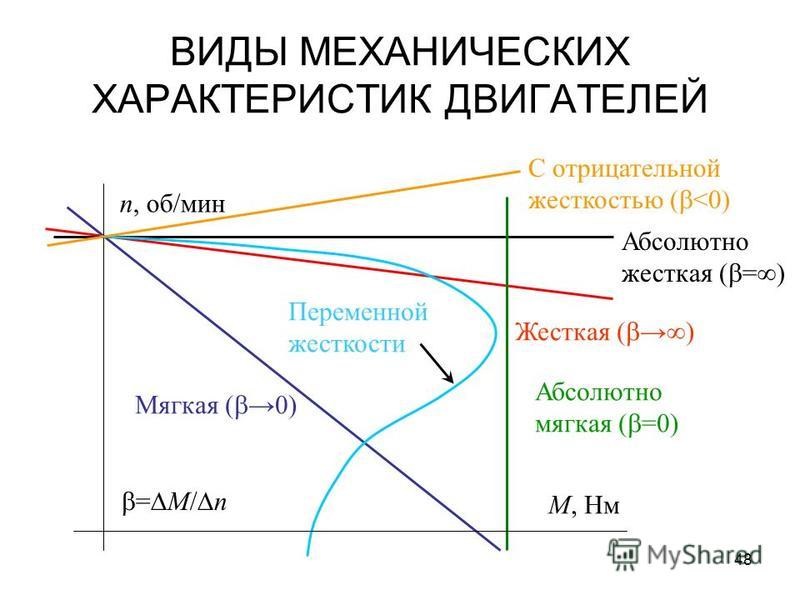
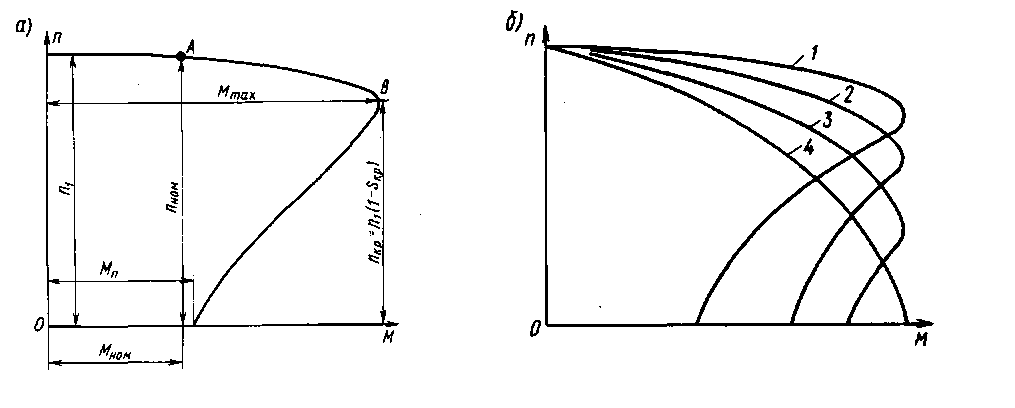
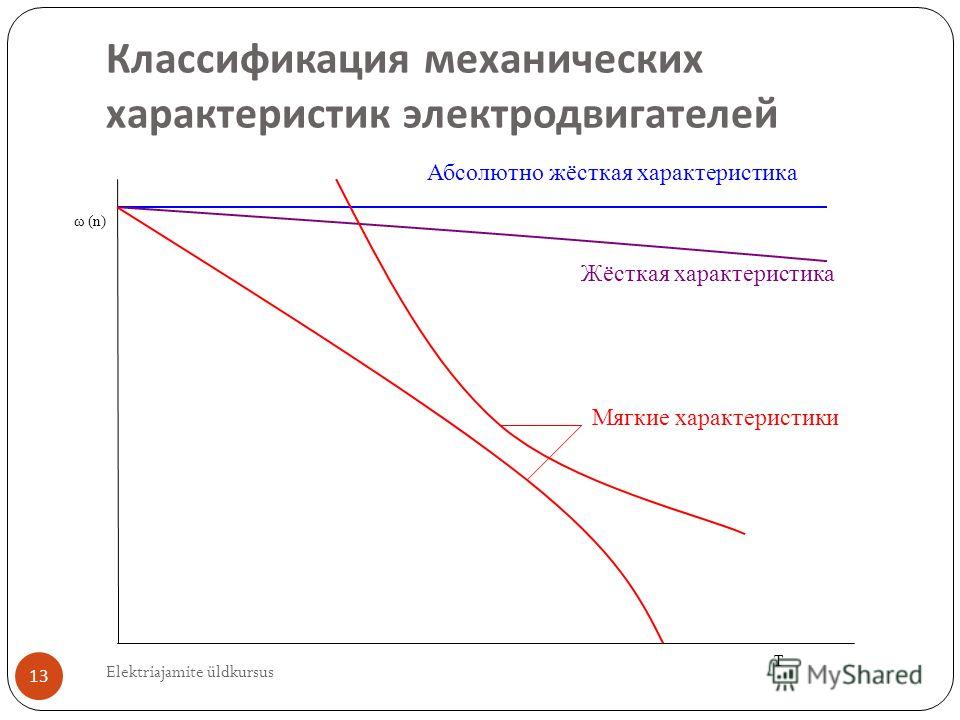
У большинства электродвигателей при увеличении момента (пли тока) скорость уменьшается. В зависимости от степени изменения скорости при изменении момента различают абсолютно жесткие, жесткие и мягкие механические характеристики (рис. 3). Если скорость электродвигателя при изменении момента остается постоянной, то механическая характеристика является абсолютно жесткой (рис. 3, а). В тех случаях, когда при изменении момента скорость изменяется незначительно, характеристика двигателя считается жесткой (рис. 3,б). Если же при изменении момента скорость изменяется значительно, характеристику называют мягкой (рис. 3, в).
Абсолютно жесткую механическую характеристику имеют синхронные электродвигатели, которые для привода механизмов подъемно-транспортных машин, как правило, не используются. У электродвигателей постоянного тока с параллельным и смешанным возбуждением, а также у асинхронных электродвигателей механическая характеристика является жесткой.
Выведенные выше уравнения скоростной и механической характеристик для электродвигателей с параллельным и последовательным возбуждением полностью справедливы и для электродвигателей со смешанным возбуждением. Они могут быть легко выведены из выражений, составленных на основе законов Кирхгофа, и имеют следующий вид. По указанным уравнениям могут быть построены скоростные и механические характеристики электродвигателя в любом режиме. Правда, построение характеристик по уравнениям (71) — (74) осложняется тем, что магнитный поток возбуждения для рассматриваемых электродвигателей не является величиной постоянной, а определенным образом зависит от нагрузки (см. Располагая характеристиками Анализируя уравнения (71) —(74), нетрудно заметить, что при работе вхолостую (Iя?0) магнитный поток электродвигателя Ф0 >0 (см. рис. 32, а) и создается током параллельной обмотки возбуждения (Ф0 Обычно для крановых электродвигателей со смешанным возбуждением n0 ? 1,5 пн. Таким образом, данные электродвигатели можно пускать в ход, не опасаясь разноса; они могут, так же как и электродвигатели с параллельным возбуждением, автоматически переходить в режим торможения с отдачей энергии в сеть при увеличении их скорости выше скорости Уравнения (71)—(74) показывают, что при увеличении нагрузки скорость электродвигателя уменьшается от По не только за счет увеличения падения напряжения в сопротивлении цепи якоря, но и за счет увеличения магнитного потока. Поэтому скоростные и механические характеристики рассматриваемого электродвигателя получаются менее жесткими, чем у электродвигателя с параллельным возбуждением, имеющего постоянный магнитный поток. По мере роста нагрузки и связанного с этим насыщения магнитной цепи жесткость характеристики повышается. Характеристики электродвигателя со смешанным возбуждением занимают промежуточное положение между характеристиками электродвигателей с параллельным и последовательным возбуждением. На рис. 34 для сравнения показаны естественные характеристики электродвигателей всех трех типов. Если в номинальном режиме большая часть полезного магнитного потока электродвигателя создается параллельной обмоткой возбуждения, то его характеристики приближаются по виду к характеристикам электродвигателя с параллельным возбуждением. |


 В противном случае характеристики будут приближаться, по виду к характеристикам электродвигателя с последовательным возбуждением. Как указывалось, для подъемно- транспортных машин выпускаются электродвигатели, в которых половина ампер-витков возбуждения создается параллельной обмоткой, а половина — последовательной. Следовательно, характеристики таких электродвигателей должны занимать какое-то среднее положение между характеристиками ранее рассмотренных электродвигателей, т. е. быть менее жесткими, чем у электродвигателей с параллельным возбуждением, и более жесткими, чем у электродвигателей с последовательным возбуждением, у которых при изменении нагрузки магнитный поток изменяется в более широких пределах.
В противном случае характеристики будут приближаться, по виду к характеристикам электродвигателя с последовательным возбуждением. Как указывалось, для подъемно- транспортных машин выпускаются электродвигатели, в которых половина ампер-витков возбуждения создается параллельной обмоткой, а половина — последовательной. Следовательно, характеристики таких электродвигателей должны занимать какое-то среднее положение между характеристиками ранее рассмотренных электродвигателей, т. е. быть менее жесткими, чем у электродвигателей с параллельным возбуждением, и более жесткими, чем у электродвигателей с последовательным возбуждением, у которых при изменении нагрузки магнитный поток изменяется в более широких пределах.МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА Механическая характеристика трехфазного асинхронного двигателя с короткозамкнутым ротор
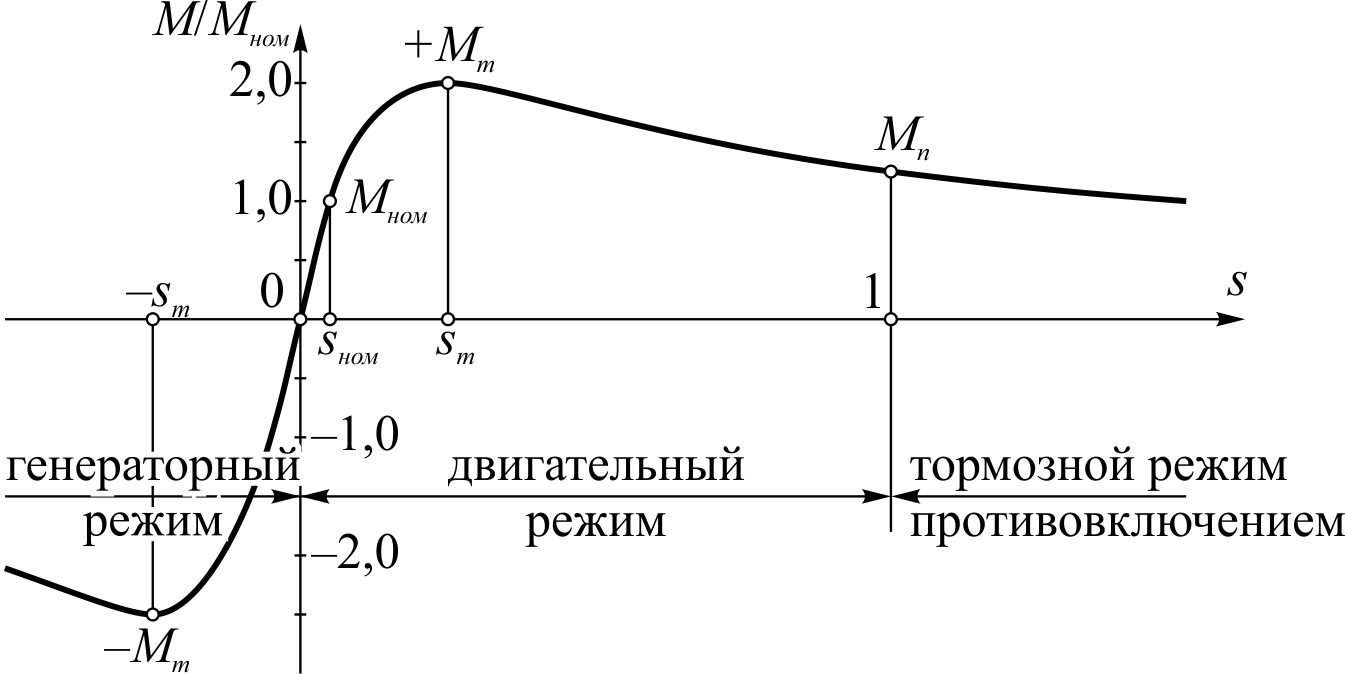
Схема включения асинхронного электродвигателя с короткозамкнутым ротором показана на рис. 7.1, а. Механическая характеристика двигателя выражает зависимость между вращающим моментом и частотой вращения п, угловой скоростью или скольжением s.
7.1, а. Механическая характеристика двигателя выражает зависимость между вращающим моментом и частотой вращения п, угловой скоростью или скольжением s.
Упрощенное уравнение механической характеристики асинхронного двигателя (формула Клосса) имеет вид
Зная величину Мн и si; и задаваясь значениями s, можно построить механическую характеристику асинхронного двигателя (рис. 7.1, б).
Участок 1, 2 представляет собой рабочую, устойчивую часть характеристики, на которой двигатель работает устойчиво. Потеря скорости при изменении нагрузки составляет 3—6% номинальной, поэтому эту часть характеристики относят к разряду жестких.
Участок характеристики 2, 3 — нерабочий. Двигатель работать под нагрузкой на этой части характеристики не может, поэтому эту часть характеристики называют неустойчивой.
Отношение критического момента Mti к номинальному /Ином называется перегрузочной способностью двигателя Л:
Отношение пускового момента Ма к номинальному Меом называется кратностью пускового момента
Такой частоты вращения ротор двигателя не может достичь самостоятельно, так как для этого необходимо, чтобы момент сопротивления был равен нулю.
Величина пускового тока в 3—8 раз больше номинального, поэтому недопустимо держать включенным двигатель, если он не развернулся после включения или если он опрокинулся (остановился) в результате перегрузки.
Трехфазный асинхронный электродвигатель с коротко- замкнутым ротором имеет следующие положительные качества: простота конструкции; отсутствие нормально искрящих частей; большая перегрузочная способность и жесткость характеристики; надежность в работе и дешевизна в изготовлении.
Наряду с положительными качествами электродвигатель с короткозамкнутым ротором имеет следующие недостатки: высокая чувствительность двигателя к колебаниям напряжения; большой пусковой ток; малый пусковой момент.
Учитывая особенности механической характеристики асинхронных электродвигателей с короткозамкутым ротором, применять их рекомендуется для установок с жесткой характеристикой, перегружаемых в процессе работы и запускаемых без нагрузки.
Трехфазные асинхронные двигатели с короткозамкнутым ротором общего назначения из-за малых пусковых моментов и больших пусковых токов мало пригодны для привода горных машин.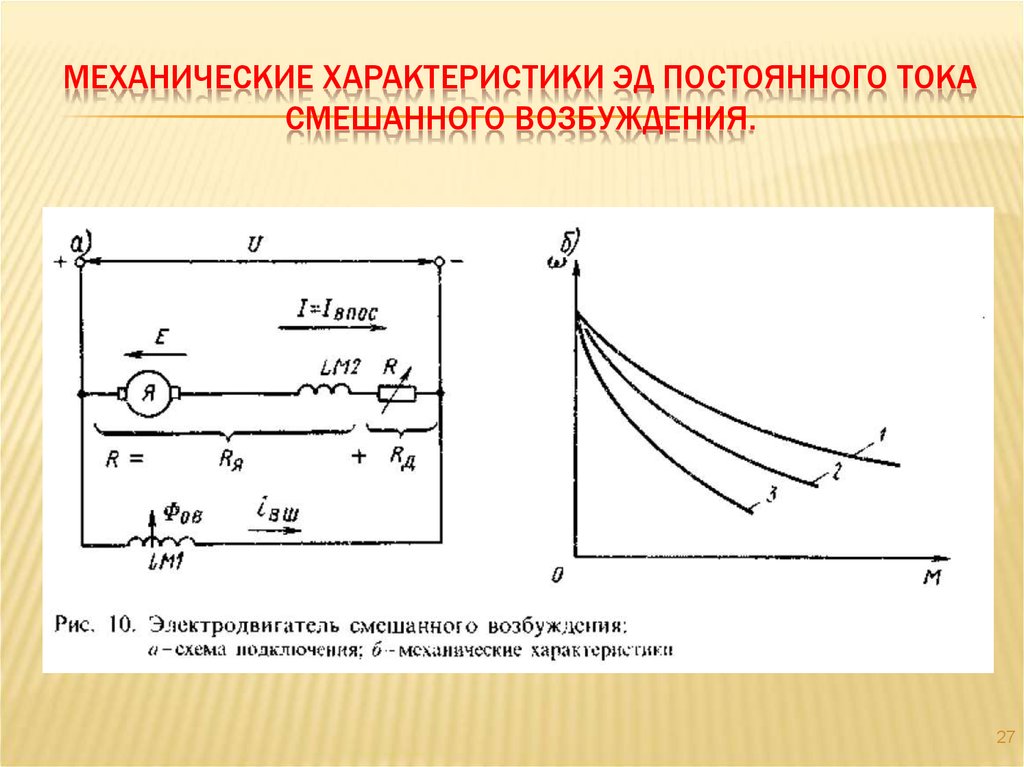 Для них созданы специальные короткозамкнутые электродвигатели с уменьшенным пусковым током и увеличенным пусковым моментом, v В основу улучшения пусковых свойств короткозамкнутых двигателей положен принцип автоматического включения дополнительного активного сопротивления в обмотку ротора на период пуска при сохранении принципиального устройства короткозамкнутого ротора. Осуществление этого принципа достигается за счет специальной конструкции обмоток ротора, активное сопротивление которых автоматически изменяется по мере изменения скольжения в двигателе. Для этого обмотки ротора выполняются либо с глубоким пазом (рис. 7.2, б), либо с двойной «беличьей клеткой» (рис. 7.2, а).
Для них созданы специальные короткозамкнутые электродвигатели с уменьшенным пусковым током и увеличенным пусковым моментом, v В основу улучшения пусковых свойств короткозамкнутых двигателей положен принцип автоматического включения дополнительного активного сопротивления в обмотку ротора на период пуска при сохранении принципиального устройства короткозамкнутого ротора. Осуществление этого принципа достигается за счет специальной конструкции обмоток ротора, активное сопротивление которых автоматически изменяется по мере изменения скольжения в двигателе. Для этого обмотки ротора выполняются либо с глубоким пазом (рис. 7.2, б), либо с двойной «беличьей клеткой» (рис. 7.2, а).
Механические характеристики двигателя с глубоким пазом 1 и двигателя с двойной «беличьей клеткой» 2 приведены на рис. 7.2 в.
Как видно из характеристик, пусковой момент двигателя с двойной «беличьей клеткой» больше критического, поэтому опрокидывание этого двигателя в результате перегрузки менее вероятно.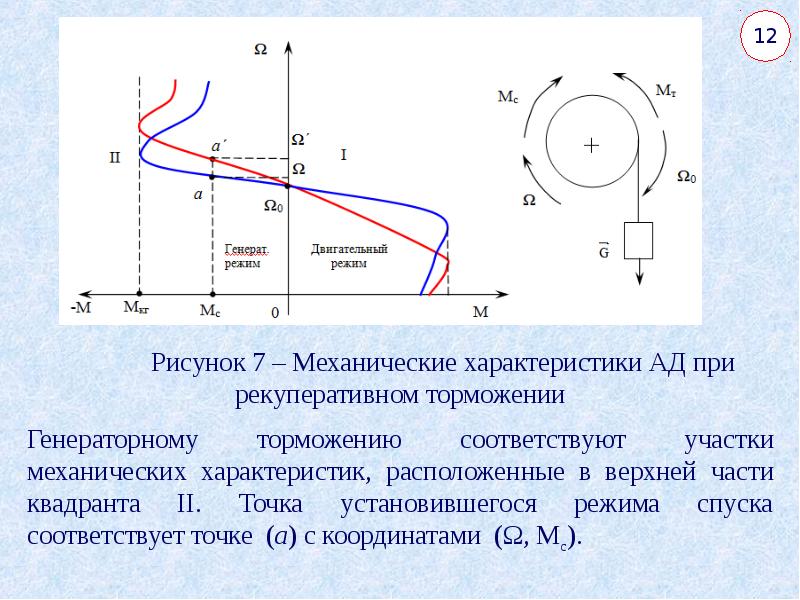 Даже при вынужденной остановке двигатель сохранит большой пусковой момент п легко разгонится, как только будет устранена причина перегрузки.
Даже при вынужденной остановке двигатель сохранит большой пусковой момент п легко разгонится, как только будет устранена причина перегрузки.
Механические характеристики исполнительных механизмов и электродвигателей. Лекция 2
СЕВАСТОПОЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТКафедра «ВОЗОБНОВЛЯЕМЫЕ ИСТОЧНИКИ ЭНЕРГИИ И
ЭЛЕКТРИЧЕСКИЕ СИСТЕМЫ И СЕТИ»
Дисциплина:
«Автоматизированный электрический привод»
Лекция № 2:
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ И
ЭЛЕКТРОДВИГАТЕЛЕЙ
Доцент кафедры к. т. н.
ГОРПИНЧЕНКО Александр Владимирович
1
ВОПРОСЫ
1. Механические характеристики исполнительных
механизмов (ИМ).
2. Классификация механических
электродвигателей (ЭД).
характеристик
3. Понятие о статической устойчивости работы
электропривода.
ЛИТЕРАТУРА
М.Г.Чиликин, А.С.Сандлер
«Общий курс электропривода», стр. 32…38.
1. Механические характеристики исполнительных механизмов.
Функциональная зависимость между статическим моментом
(моментом сопротивления) и угловой скоростью называется в ЭП
механической
характеристикой
исполнительного
механизма: Mс = f (Ω ).
2
3
Статические моменты исполнительных механизмов делятся на 2
класса:
1. Моменты, не зависящие от параметров движения: Mc = const
(для грузоподъемных механизмов и для поршневых насосов,
работающих на постоянное противодавление.
2. Моменты, зависящие от скорости: Mc = f(Ω)
Для многих механизмов эта зависимость в общем случае выражается
эмпирическим уравнением:
(1)
где: Mс – момент сопротивления производственного механизма при
скорости Ω
M0 – начальный статический момент, обусловленный трением,
Mс.н – момент сопротивления при номинальной скорости ΩН,
x – показатель степени, определяющий характер зависимости
(–1 ≤ x ≤ 2 ).
4
При x=1, механическая характеристика линейно-возрастающая
(прямая 2 на рис.
 1), момент сопротивления линейно зависит от
1), момент сопротивления линейно зависит отскорости Ω, увеличиваясь с ее возрастанием.
Ω ↑ → Е↑ → I ↑ → Mэм↑ = Mс↑
При x= 2 механическая характеристика нелинейно-возрастающая
(параболическая) (кривая 3 на рис. 1).
При x = –1 механическая характеристика нелинейно – спадающая
(кривая 4 на рис.1).
Момент сопротивления МС изменяется обратно пропорционально
скорости, а мощность, потребляемая механизмом, остается
постоянной Рmax=const .
[Рmax = M ↑ Ω ↓]
2. Классификация механических характеристик электродвигателей
5
Механической характеристикой ЭД называется зависимость угловой
скорости двигателя от создаваемого им электромагнитного момента:
Ω=f (M) или n = f (M)
Различают статические МХ и динамические МХ
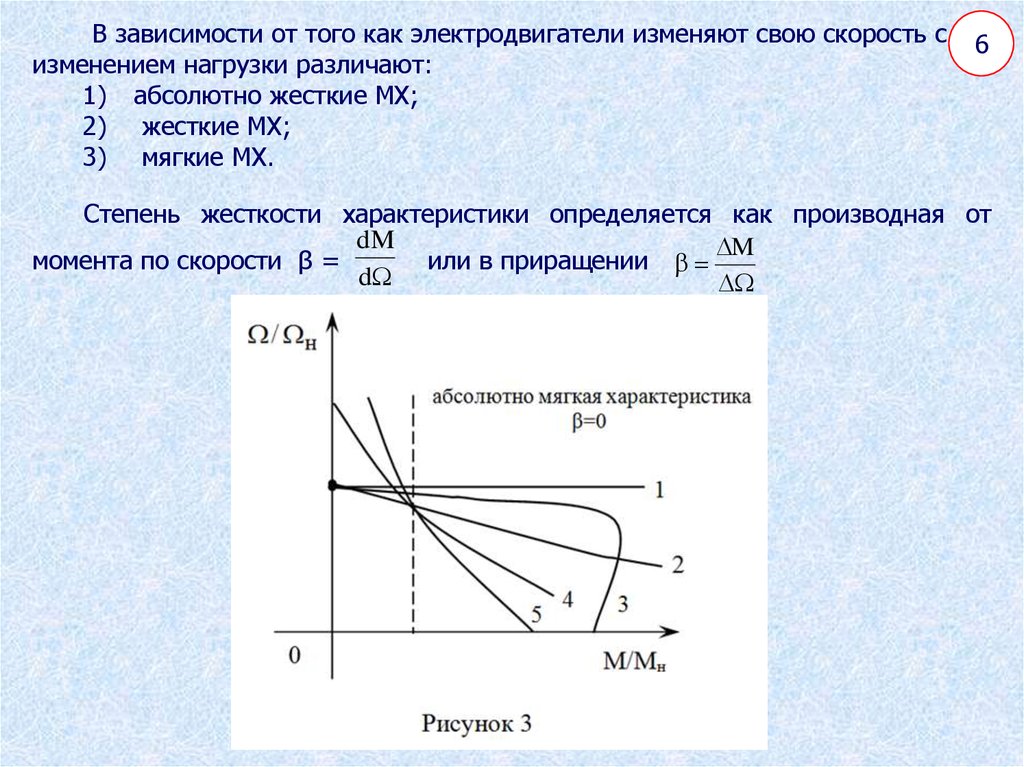
В зависимости от того как электродвигатели изменяют свою скорость с
изменением нагрузки различают:
1) абсолютно жесткие МХ;
2) жесткие МХ;
3) мягкие МХ.
6
Степень жесткости характеристики определяется как производная от
dM
M
момента по скорости β =
или в приращении
d
7
Абсолютно жесткая характеристика, для которой
Ω = const, =∞.

Такую характеристику имеют синхронные электродвигатели
(график 1 на рис.3).
Жесткая характеристика, для которой Ω с ростом М падает
незначительно ≥ 10 ÷ 40.
На таких характеристиках работают ЭД постоянного тока с
независимым и параллельным возбуждением (график 2 на рис.3)
и асинхронные двигатели в пределах допустимых нагрузок
(график 3 на рис.3).
Мягкая характеристика для которой
характеристикам относятся характеристики ЭД постоянного
тока со смешанным (график 4 на рис. 3) и последовательным
возбуждением (график 5 на рис. 3).
Крайний случай мягкой характеристики это когда при Ω = var
Mc= сonst и β = 0 .
3. Понятие о статической устойчивости работы электропривода
8
Работе ЭД и ИМ в установившемся режиме соответствует равновесие
момента сопротивления механизма и вращающего момента двигателя при
определенной скорости, т. е. M = Mс.
Изменение момента сопротивления на валу двигателя приводит к тому, что
скорость двигателя и момент, который он развивает, могут автоматически
изменяться и привод будет продолжать устойчиво работать при другой
скорости с новым значением момента.

9
Под статической устойчивостью понимается такое состояние
установившегося режима работы привода, когда при случайно возникшем
отклонении скорости от установившегося значения привод возвратится в
точку установившегося режима.
При неустойчивом движении любое, даже самое малое, отклонение
скорости от установившегося значения приводит к изменению состояния
привода — он не возвращается в точку установившегося режима.
ЭД при моменте сопротивления Мс = Мс1 = const работает в 10
установившемся режиме со скоростью Ω1 в точке А. Режим точки А
характеризуется М = Мс1 .
Выведем систему из равновесия.
1. Дадим (+) ΔΩ тогда Мс > М и М – Мс
Ω = Ω1, т.е. система возвращается в исходное состояние.
2.Дадим (–) ΔΩ, тогда М > Мс и М – Мс > 0 и ЭД разгоняется до
Ω = Ω1, т.е. система возвращается в исходное состояние.
Следовательно, работа ЭП – устойчива.
Если рассмотреть геометрические соотношения при анализе
взаимного расположения характеристик, то условием статической
устойчивости ЭП будет факт выполнения неравенства
,
так называемый, критерий статической устойчивости системы ЭП или
, или β – βс
Пример устойчивой и неустойчивой работы ЭП рассмотрим при
работе АД на нагрузку с Мс = сonst.
В точке N:
11
A
B
устойчива.
A
В точке М:
C > 0, а βс = 0 тогда β – βс> 0 т.е. работа ЭП
неустойчива.
Особенности механических характеристик приводов
Привод подъема, сухого и вязкого трения, транспортный, вентиляторный, позиционный привод. Трудности увязки характеристик двигателей и приводов
Каждый привод имеет свою механическую характеристику: соотношение между скоростью и моментом сопротивления. То есть, для каждой скорости привода есть какое-то определенное сопротивление вращению вала двигателя в устоявшемся режиме.
Так, например, существуют электроприводы, в которых нагрузка никак или почти никак не зависит от скорости. Классический образец – привод подъема грузоподъемной машины. С какой бы скоростью мы бы не поднимали груз, его масса, а значит и вес, будут неизменны, и нагрузка на электропривод не изменится.
В то же время при опускании груза момент нагрузки будет совпадать с направлением вращения двигателя, и это вынудит двигатель перейти в режим электромагнитного тормоза.
Другая категория условно называется приводами «сухого трения». Статический момент сопротивления в них не зависит от абсолютного значения скорости, но меняет свое направление вместе с ней.
Пример подобного привода – реверсивный привод металлорежущего станка. Вне зависимости от направления включения двигателя в нем всегда есть определенный постоянный момент статического сопротивления.
Один из самых редких на практике приводов – это привод «вязкого трения», статический момент сопротивления в котором прямо пропорционален скорости.
Теоретически модель подобного представить нетрудно. Достаточно вообразить себе механизм, перемещающий в двух направлениях рабочий орган в вязкой среде (в жидкости) при условии отсутствия помех со стороны земного притяжения.
Гораздо чаще нагрузка на привод возрастает не прямо пропорционально скорости вала, а по зависимости, описываемой параболой. То есть, даже при небольшом возрастании скорости, статический момент сопротивления будет возрастать очень резко.
Это характерно, например, для приводов вентиляторов и насосов, поэтому привод с такой статической характеристикой и получил название «вентиляторного».
В транспортном приводе момент сопротивления вращению зависит от текущего ускорения, то есть от динамической составляющей.
При разгоне, он преодолевает большой момент, а впоследствии работает практически без нагрузки, зато на большой скорости. Именно такой привод у трамваев, троллейбусов, железнодорожных локомотивов.
Есть и еще один, специфический тип привода – позиционный. Его статический момент сопротивления зависит от текущей позиции. Например, радиолокационная антенна, будучи расположенной перпендикулярно направлению ветра, будет оказывать гораздо большее сопротивление повороту в одну сторону, а в другую повернется свободно. В другом положении осложнен будет поворот в противоположную сторону. Таким образом, момент сопротивления позиционного привода зависит не от скорости, а от положения рабочего органа.
Таким разнообразием отличаются статические характеристики приводов. В идеале, механическая характеристика приводного электродвигателя в каждом случае должна быть как можно ближе к характеристике привода. Это позволит двигателю работать с оптимальными энергетическими показателями, и вообще даст возможность эффективного регулирования и управления.
В идеале, механическая характеристика приводного электродвигателя в каждом случае должна быть как можно ближе к характеристике привода. Это позволит двигателю работать с оптимальными энергетическими показателями, и вообще даст возможность эффективного регулирования и управления.
Но механические характеристики двигателей – зависимости скорости вращения вала двигателя от момента, развиваемого на валу – не отличаются особым разнообразием.
Асинхронные, синхронные двигатели, двигатели постоянного тока параллельного и независимого возбуждения имеют жесткую механическую характеристику, подходящую для работы в составе привода подъема. Их скорость незначительно снижается при увеличении статического момента сопротивления на валу (у синхронного двигателя скорость даже не снижается вовсе).
Двигатели постоянного тока последовательного и смешанного возбуждения и коллекторные однофазные двигатели переменного тока способны развивать большой момент на малых скоростях, а при отсутствии момента сопротивления их скорость вращения резко возрастает. Их механическая характеристика подходит для транспортного электропривода.
Их механическая характеристика подходит для транспортного электропривода.
Вот и все на этом. Двигателей, естественная механическая характеристика которых подходит для вентиляторного привода, например, просто не существует. Для привода вентилятора используется обычно асинхронный двигатель. При отсутствии какого-либо регулирования характеристика привода и характеристика двигателя сойдутся в одной общей точке. Следовательно, он будет работать только с одной постоянной скоростью при одном моменте на валу.
При использовании двигателя с жесткой характеристикой в транспортном приводе двигатель будет либо работать большую часть времени в недогруженном состоянии с низким КПД, либо будет запускаться с трудом.
Чтобы оптимизировать работу привода и добиться необходимого соотношения скорости вращения вала и электромагнитного момента, наиболее эффективно использование тиристорно-импульсного регулирования. Причем это в равной степени касается электродвигателей переменного и постоянного тока.
Полупроводниковые управляемые преобразователи позволяют формировать практически произвольные механические характеристики двигателей, обеспечивая лучший КПД и коэффициент мощности.
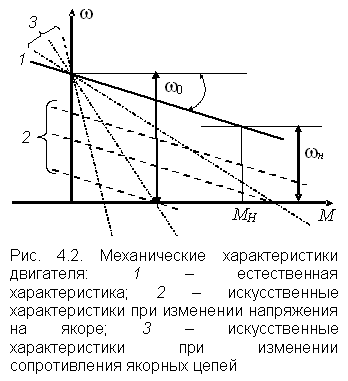
Различают естественные и искусственные механические характеристики электродвигателей.
Естественная механическая характеристика асинхронного двигателя
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественные и искусственные механические характеристики электродвигателей
ПЛАН ЛЕКЦИИ
Механические характеристики электродвигателей
ТЕМА ЛЕКЦИИ 10
2. Жесткостьмеханических характеристик
Жесткостьмеханических характеристик
6. Механическая характеристика синхронного двигателя.Область применения синхронных двигателей на судах
Механической характеристикой двигателя, независимо от рода тока, называют зависимость угловой скорости вала электродвигателя ω (далее – двигателя) от электромагнитного момента двигателя , т.е зависимость ω ( ).
Здесь следует сделать важное замечание: в соответствии с уравнением моментов, в установившемся режиме = , электромагнитный момент двигателя уравновешивается статическим моментом (моментом сопротивления) механизма. Это означает, что величина электромагнитного момента двигателя полностью зависит от момента механизма – чем больше тормозной момент механизма, тем больше вращающий момент двигателя, и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной – его скорость.
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33].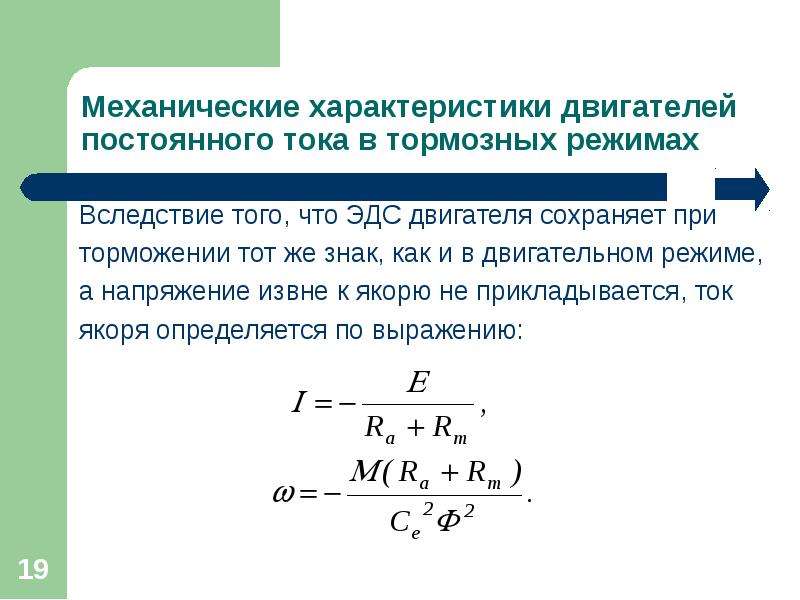 Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β — ϶ᴛᴏ отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода.
β = (М2– М1)/( ω2– ω1)= Δ / Δω
Обычно на рабочих участках механические характеристикиэлектродвигателей имеют отрицательную жёсткость β < 0, так как( ω2< ω1,
М1< М2) при большей скорости электромагнитный момент меньше.
Естественнаямеханическая характеристика — ϶ᴛᴏ зависимость ω( ), снятая при нормальных условиях работы двигателя, ᴛ.ᴇ. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.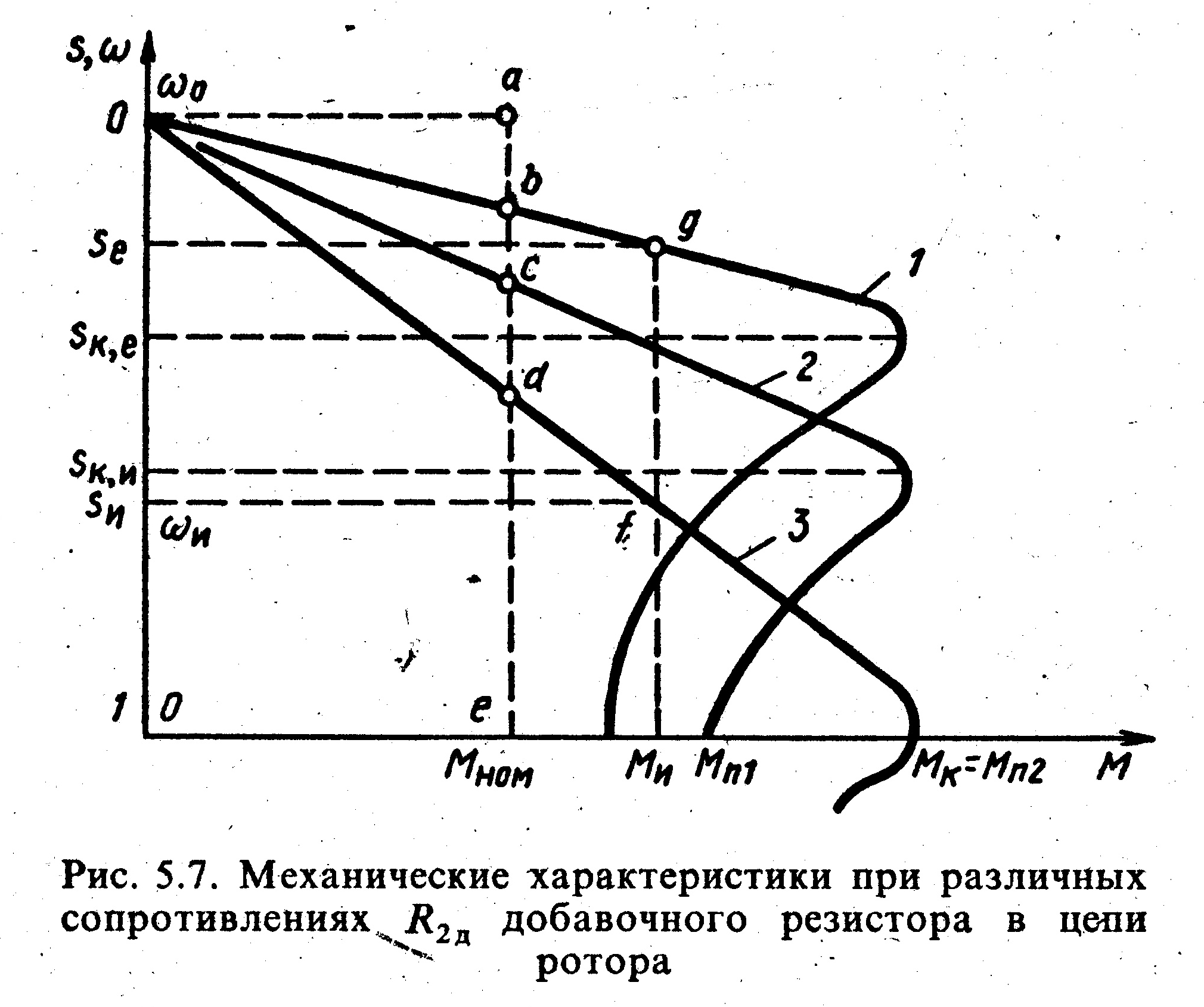
К параметрам питающей сети относятся: при постоянном токе – напряжение, при переменном токе – напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных, называют искусственными.
Искусственныехарактеристики можно получить путем изменения параметров двигателя, к примеру, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, ᴛ.ᴇ. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента͵ к примеру, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. В случае если у двигателя таких ступеней – пять, то такой двигатель имеет шесть характеристик – пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественные механические характеристики двигателей разных типов.
Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки статора
Механические характеристики электродвигателей постоянного тока 1 2 3
Механические характеристики электродвигателей постоянного тока 1. 2. 3. 1 Механические характеристики двигателей постоянного тока ПВ. Механические характеристики двигателей постоянного тока СВ. Механические характеристики двигателей постоянного тока в тормозных режимах.
Механические характеристики двигателя постоянного тока ПВ Схема включения двигателя Rа Rов Rд постоянного тока последовательного возбуждения где 2
Механические характеристики двигателя постоянного тока ПВ Характеристика намагничивания двигателя постоянного тока ПВ 3
Механические характеристики двигателя постоянного тока ПВ ω М 4
Механические характеристики двигателя постоянного тока ПВ μ, ν ν=f(i) μ=f(i) i 5 Зависимости момента и скорости от тока якоря двигателя последовательного возбуждения в относительных единицах
Механические характеристики двигателя постоянного тока ПВ ω ν Rа+Rов νе 1 νе 2 ν е 3 ν 1 ν 2 ν 3 i 1 i 2 6 Rа+Rов R 1 i i 3 R 1>Rа+Rов R 2>R 1 М
Механические характеристики двигателя постоянного тока ПВ Особенностью характеристик двигателя постоянного тока последовательного возбуждения является невозможность получения режима идеального холостого хода. При нагрузке ниже 15… 20% номинальной работа двигателя на естественной характеристике практически недопустима из-за чрезмерного увеличения скорости вращения якоря. 7
При нагрузке ниже 15… 20% номинальной работа двигателя на естественной характеристике практически недопустима из-за чрезмерного увеличения скорости вращения якоря. 7
Механические характеристики двигателя постоянного тока СВ Двигатель смешанного возбуждения имеет две обмотки возбуждения: независимую и последовательную. Поэтому его механические характеристики занимают промежуточное положение между соответствующими характеристиками двигателей независимого и последовательного возбуждения. 8
Механические характеристики двигателя постоянного тока СВ ω ω0 Rа+Rов R 1>Rа+Rов R 2>R 1 М Механические характеристики двигателя смешанного возбуждения при реостатном регулировании 9
Механические характеристики двигателей постоянного тока в тормозных режимах Тормозные режимы — это генераторные режимы, поскольку механическая энергия, поступившая с вала машины, преобразуется в электрическую и передается через электрические зажимы машины. В зависимости от того, куда поступает электрическая энергия, различают три тормозных режима: • рекуперативное торможение; • торможение противовключением; 10 • динамическое торможение.
В зависимости от того, куда поступает электрическая энергия, различают три тормозных режима: • рекуперативное торможение; • торможение противовключением; 10 • динамическое торможение.
Механические характеристики двигателей постоянного тока в тормозных режимах Торможение с отдачей энергии в сеть (рекуперативное) или генераторный режим работы параллельно с сетью достигается если якорь двигателя вращать от некоторого постороннего источника со скоростью, превышающей скорость идеального холостого хода, то ЭДС двигателя будет больше приложенного напряжения, в результате чего ток в якоре двигателя и момент изменят свой знак. 11
Механические характеристики двигателей постоянного тока в тормозных режимах 1 + 2 D С +ω 1 6 В 3 А 5 F Мтд Мтпр E Мс 4 24 19 17 15 12 11 1 — механическая характеристика ДПТ в двигательном режиме; 2 – механическая характеристика при рекуперативном торможении; 3 – механическая характеристика при динамическом торможении; 4 – противо- включение сменой полярности; 5 – противовключение введением Rпр; 6 – механическая характеристика рабочей машины Механические характеристики ДПТ
Механические характеристики двигателей постоянного тока в тормозных режимах Так как ток двигателя меняет направление, то очевидно, что момент также будет отрицательным: 13
Механические характеристики двигателей постоянного тока в тормозных режимах Торможение противовключением или генераторный режим работы последовательно с сетью может быть получен двумя способами: • изменением полярности на обмотке якоря или обмотке возбуждения; • включением в цепь якоря сопротивления Rпр. 14
14
Механические характеристики двигателей постоянного тока в тормозных режимах 1 способ: Вследствие механической инерции скорость двигателя и ЭДС в начальный момент сохраняются неизменными, а ток будет равен: 15
Механические характеристики двигателей постоянного тока в тормозных режимах Торможение противовключением по второму способу может происходить, например, в режиме тормозного спуска в приводе подъемника, когда двигатель включен на подъем, а момент, развиваемый грузом, заставляет привод вращаться в сторону спуска груза. 16
Механические характеристики двигателей постоянного тока в тормозных режимах При торможении противовключением в режиме тормозного спуска ток якоря будет равен: 17
Механические характеристики двигателей постоянного тока в тормозных режимах 18 + Динамическое торможение Rр LL 1 или генераторный режим работы независимо от сети КМ 1 осуществляется отключением М обмотки якоря от сети и Rд. т. КМ 2 замыканием ее на резистор Rд. т. . Обмотка Схема управления динамическим возбуждения остается торможением двигателя постоянного тока присоединенной к сети.
т. КМ 2 замыканием ее на резистор Rд. т. . Обмотка Схема управления динамическим возбуждения остается торможением двигателя постоянного тока присоединенной к сети.
Механические характеристики двигателей постоянного тока в тормозных режимах Вследствие того, что ЭДС двигателя сохраняет при торможении тот же знак, как и в двигательном режиме, а напряжение извне к якорю не прикладывается, ток якоря определяется по выражению: 19
Механические характеристики двигателей постоянного тока в тормозных режимах Для двигателя последовательного возбуждения возможны два тормозных режима: • режим торможения противовключением; • режим динамического торможения. 20
Механические характеристики двигателей постоянного тока в тормозных режимах ω II В А I -Мс С D Мс М III Е 21 Механическая характеристика при противовключении ДПТ ПВ при смене полярности
Механические характеристики двигателей постоянного тока в тормозных режимах ω I А В С Мк Мс М D II 22 Механическая характеристика при противовключении ДПТ ПВ при введении дополнительного сопротивления
Механические характеристики двигателей постоянного тока в тормозных режимах Динамическое торможение двигателя последовательного возбуждения может быть осуществлено двумя способами: • самовозбуждением; • с независимым возбуждением. 23
23
Механические характеристики двигателей постоянного тока в тормозных режимах Rр LL 1 Схема включения ДПТ ПВ при динамическом торможении самовозбуждением М — + Rр LL 1 М Rд. т. 24 25 Схема включения ДПТ ПВ при динамическом торможении с независимым возбуждением 12
Механические характеристики двигателей постоянного тока в тормозных режимах ω II В А 0 25 Мс I М Механическая характеристика при динамическом торможении ДПТ ПВ самовозбуждением
Характеристики электродвигателей | Электротехника
Для выбора надежного и эффективного двигателя важно, чтобы условия эксплуатации были хорошо известны.
Недостаточно просто указать выходную мощность в кВт и скорость, но необходимо также знать следующие дополнительные сведения:
(i) Крутящий момент на валу во время работы, запуска и при различных нагрузках.
(ii) Ускоряющий момент и тормозной момент.
(iii) Частота переключения.
(iv) КПД двигателя при различных нагрузках.
(v) Прочие рабочие требования.
При изучении поведения двигателя, выбранного для конкретного ведомого агрегата, одна из первых проблем заключается в том, чтобы определить, соответствует ли характеристика скорости-момента двигателя требованиям, предъявляемым характеристикой скорость-момент ведомого агрегата. Поведение привода во время переходного периода пуска, торможения или переключения скорости также зависит от того, как характеристики скорости-момента двигателя и ведомого агрегата меняются в зависимости от скорости.
Поэтому обязательно изучить эти характеристики, чтобы иметь возможность правильно выбрать двигатель и получить экономичный привод.
1. Скоростно-крутящие характеристики машин или механизмов: Характеристика крутящего момента машины или механизма, заданная соотношением ω = f (T L ), определяется как соотношение между скоростью, с которой он работает, и моментом сопротивления или нагрузки, который он развивает.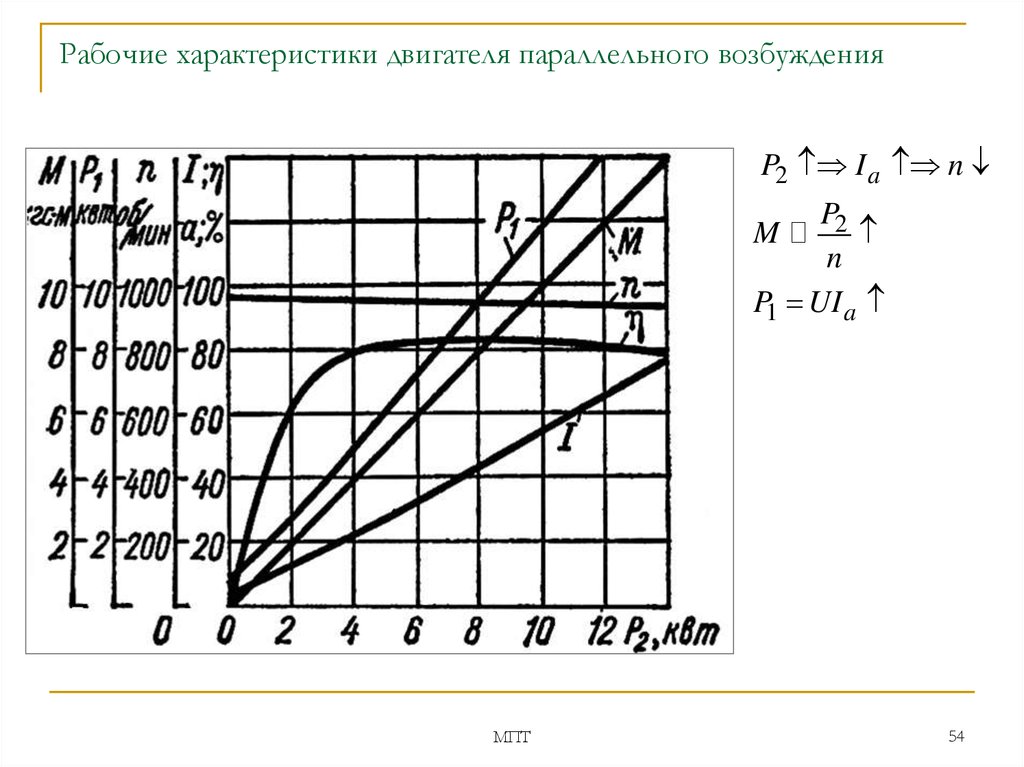
Различные типы механизмов и машин обладают разными скоростно-крутящими характеристиками.Однако можно сделать несколько общих выводов, если использовать следующее эмпирическое уравнение для скоростно-крутящей характеристики некоторой приводной единицы промышленного оборудования —
T L = T 0 + (T rn -T 0 ) (ω / ω n ) x … (1,3)
, где T L — крутящий момент полной нагрузки (или сопротивления), развиваемый устройством при скорости ω, to, T 0 — крутящий момент сопротивления, развиваемый устройством из-за трения в его движущихся частях, T rn — момент сопротивления, развиваемый устройством, когда оно приводится в движение с номинальной номинальной скоростью ω n , а x — экспоненциальный коэффициент, характеризующий изменение момента покоя с изменением скорости.
Уравнение выше. (1.3) позволяет условно разделить скоростные характеристики различных видов машин и механизмов на следующие категории:
и. Нагрузки, требующие постоянного крутящего момента на всех скоростях:
Нагрузки, требующие постоянного крутящего момента на всех скоростях:
Такая нагрузка представляет двигателю пассивный крутящий момент, который практически не зависит от скорости. Он также характеризуется потребностью в дополнительном крутящем моменте при очень близкой к нулевой скорости. Для этой характеристики x = 0 и момент нагрузки T L не зависит от скорости.Моментная характеристика для таких нагрузок показана вертикальной линией на рис. 1.4. К таким нагрузкам относятся сухое трение, краны во время подъема, подъемные лебедки, механизм подачи станков, поршневые насосы, работающие при постоянном напоре, и конвейеры, обрабатывающие постоянный вес материала в единицу времени. В силовых приложениях это обычно называется моментом отрыва, а в системах управления — трениями (возникающими из-за трения прилипания).
Поскольку он меняет знак при реверсировании вращения, характеристика момента сухого трения является прерывистой, как показано на рис.1. 4.
4.
ii. Нагрузки с линейно-восходящей характеристикой:
Такие характеристики скорость-крутящий момент, показанные прямой линией II на рис. 1.4, демонстрируются календарными машинами, вихретоковыми тормозами, генераторами постоянного тока с независимым возбуждением, обеспечивающими нагрузки с фиксированным омическим сопротивлением и жидкостное или вязкое трение. В этом случае x = 1 и момент нагрузки T L возрастает прямо пропорционально скорости.
iii. Нагрузки с нелинейно-восходящей (параболической) характеристикой:
Для такой характеристики x = 2 и момент нагрузки T L пропорционален квадрату скорости.Такая характеристика иллюстрируется кривой III на рис. 1.4. Нагрузка со значительной ветровой нагрузкой, крайним примером которой является вентилятор, имеет крутящий момент, который изменяется почти как квадрат скорости. Воздуходувки, центробежные насосы, гребные винты на кораблях или самолетах, водяные колеса, трение труб, скоростной напор насосов и т.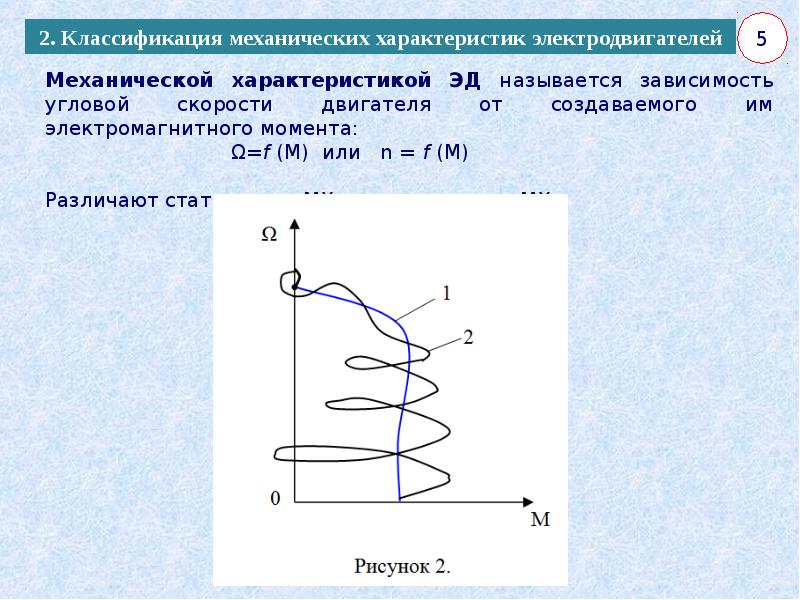 Д. Также имеют такие же характеристики скорости-момента.
Д. Также имеют такие же характеристики скорости-момента.
iv. Нагрузки с нелинейно падающей (гиперболической) характеристикой (или нагрузка с постоянной мощностью):
Для такой характеристики x = — 1 и момент нагрузки T L обратно пропорционален скорости, в то время как мощность, необходимая для привода данного агрегата, остается неизменной.Такая характеристика иллюстрируется кривой IV на рис. 1.4. Под эту категорию нагрузок подпадают определенные типы токарных, расточных, фрезерных и других видов металлорежущих станков, моталок сталелитейных заводов.
Перечисленные выше категории нагрузок не охватывают все случаи, которые могут встречаться на практике, но дают хорошее представление о характеристиках, типичных для очень многих видов промышленного оборудования. На практике мы можем встретить нагрузки, которые представляют собой комбинацию этих основных типов нагрузок.
2. Временные характеристики момента нагрузки: Возможно, изменение момента нагрузки во времени имеет такое же или большее значение при выборе двигателя. Это изменение в некоторых приложениях может быть периодическим и повторяющимся, причем один цикл изменения называется рабочим циклом.
Это изменение в некоторых приложениях может быть периодическим и повторяющимся, причем один цикл изменения называется рабочим циклом.
Различные типы нагрузок с точки зрения характеристик момента нагрузки можно классифицировать следующим образом:
(i) Непрерывные, постоянные нагрузки, например, бумагоделательные машины, центробежные насосы или вентиляторы, работающие в течение длительного времени в одних и тех же условиях.
(ii) Непрерывные переменные нагрузки, такие как подъемные лебедки, токарные станки по металлу, конвейеры и т. Д.
(iii) Пульсирующие нагрузки, такие как поршневые насосы и ткацкие станки, и в целом все машины, имеющие коленчатый вал.
(iv) Ударная нагрузка, такая как прокатные станы, ножницы, прессы, кузнечные молотки и т. Д. При таких нагрузках возникают явные, регулярные и повторяющиеся пики или импульсы нагрузки.
(v) Кратковременные нагрузки, такие как мотор-генераторные установки для зарядки аккумуляторов; серводвигатели используются для дистанционного управления зажимными стержнями сверлильных станков.
(vi) Кратковременные прерывистые нагрузки, такие как краны и подъемные механизмы, экскаваторы, роликовые поезда и т. Д.
Некоторые машины (например, шаровые мельницы) строго не относятся ни к одной из упомянутых выше категорий. Если бы такие нагрузки (шаровые мельницы, камнедробилки и т. Д.) Характеризовались частыми ударами сравнительно небольших пиков, было бы более целесообразно отнести их к категории непрерывных переменных нагрузок, а не ударных нагрузок. Иногда бывает довольно сложно провести различие между пульсирующими нагрузками и ударными нагрузками, поскольку обе они имеют периодический характер.
Один и тот же привод может быть представлен моментом нагрузки, который изменяется либо со скоростью, либо со временем. Наиболее подходящим примером является нагрузка вентилятора, момент нагрузки которой T L пропорционален квадрату скорости, также является непрерывной постоянной нагрузкой.
3. Моменты нагрузки, изменяющиеся в зависимости от угла смещения вала: Во всех машинах с коленчатыми валами, таких как поршневые насосы и компрессоры, рамные пилы и т. Д., Крутящий момент нагрузки изменяется в зависимости от углового смещения вала или ротора двигателя.Для всех таких машин крутящий момент нагрузки T L может быть разделен на две составляющие: одна имеет постоянную величину T av , а другая — переменную T L ‘, которая периодически изменяется по величине в зависимости от углового положения вала. . Такие характеристики момента нагрузки для простоты можно представить в виде ряда Фурье в виде суммы колебаний основной и гармонической частот, т. Е.
Д., Крутящий момент нагрузки изменяется в зависимости от углового смещения вала или ротора двигателя.Для всех таких машин крутящий момент нагрузки T L может быть разделен на две составляющие: одна имеет постоянную величину T av , а другая — переменную T L ‘, которая периодически изменяется по величине в зависимости от углового положения вала. . Такие характеристики момента нагрузки для простоты можно представить в виде ряда Фурье в виде суммы колебаний основной и гармонической частот, т. Е.
Где θ = ωt, ω — угловая скорость вала двигателя, приводящего в действие компрессор.
Во время изменения скорости происходят только небольшие отклонения от фиксированного значения скорости ω a , поэтому смещение может быть представлено как θ = (ω a + Δω) t. Таким образом, переменная часть крутящего момента нагрузки может быть задана как —
Членом rΔωt, имеющим очень малую величину, можно пренебречь. Таким образом, ограничиваясь небольшими отклонениями по углу от положения равновесия, крутящий момент нагрузки, изменяющийся с угловым смещением вала, может быть преобразован в крутящий момент, который периодически изменяется w.r.t. время.
Таким образом, ограничиваясь небольшими отклонениями по углу от положения равновесия, крутящий момент нагрузки, изменяющийся с угловым смещением вала, может быть преобразован в крутящий момент, который периодически изменяется w.r.t. время.
В Статье 1.9.1. учитывались моменты нагрузки, изменяющиеся со скоростью. Однако моменты нагрузки, зависящие не только от скорости, но и от характера пути, проходимого грузом во время его движения, действительно существуют как в подъемных механизмах, так и в транспортных системах. Например, сопротивление движению поезда, движущегося вверх по градиенту или выполняющего поворот, зависит от величины уклона или радиуса кривизны пути соответственно.
Сила из-за градиента определяется как —
F г = 1000 Вт sin θ кг. … (1,6)
Где, W — масса поезда в тоннах.
Но на железнодорожных работах уклон выражается как подъем в метрах на расстоянии 100 м пути и обозначается «процентным уклоном» (G%)
т. е. G = Sin θ x 100
е. G = Sin θ x 100
или sin θ = G / 100
Подставляя sin θ = G / 100 в уравнение. (1.6) имеем —
F г = 1000 Вт × Г / 100 = 10 Вт · кг кг.… (1,7)
Сила тяги, необходимая для преодоления сопротивления кривизне, определяется по эмпирической формуле, приведенной ниже —
F c = 700,000 Вт / об, кг… (1,8)
Где, R — радиус кривизны в метрах.
В подъемных механизмах, в которых не используются хвостовые или балансировочные тросы (рис. 1.7), момент нагрузки возникает не только из-за веса ненагруженной или загруженной кабины, но также из-за веса подъемных канатов или тросов, которые зависит от положения двух клеток.Когда клетка 1 находится в самом нижнем положении и должна подниматься вверх, весь вес веревки также должен быть перемещен вверх.
Когда обе клетки находятся на одинаковой высоте, вес поднимаемой веревки становится равным нулю, поскольку вес веревок с обеих сторон уравновешивает друг друга, будучи равной по длине.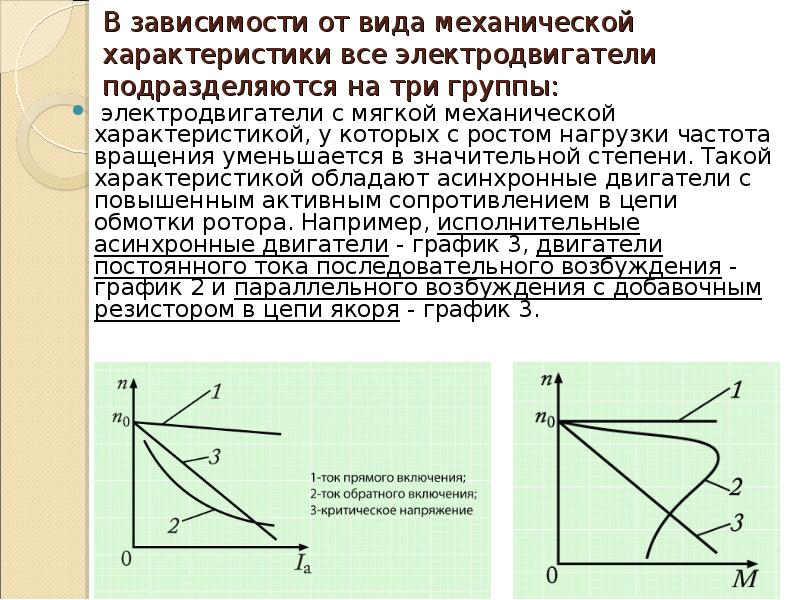 Когда клетка 1 находится в более высоком положении, чем клетка 2, часть веса веревки действует таким образом, чтобы способствовать движению клетки 1 вверх. В конечном итоге, когда клетка 1 достигает самого верхнего положения, весь вес каната веревка способствует движению вверх.
Когда клетка 1 находится в более высоком положении, чем клетка 2, часть веса веревки действует таким образом, чтобы способствовать движению клетки 1 вверх. В конечном итоге, когда клетка 1 достигает самого верхнего положения, весь вес каната веревка способствует движению вверх.
Сила, препятствующая движению груза вверх, F r из-за переменного веса каната в зависимости от положения груза, определяется как —
Где W r — общий вес веревки в кг, h — желаемая максимальная высота, на которую клетка должна быть перемещена вверх, в метрах, а x — высота клетки в любом произвольном положении снизу. максимальная позиция в метрах.
При больших значениях h сила F r в значительной степени влияет на характеристики привода, используемого в подъемных механизмах, поскольку в такой ситуации вес каната может быть значительно больше, чем вес поднимаемого груза. снизу вверх.Если мы используем хвостовые тросы, как показано пунктирными линиями на рис. 1.7, вес соединительного троса можно уравновесить, и можно добиться почти плавного движения клеток.
1.7, вес соединительного троса можно уравновесить, и можно добиться почти плавного движения клеток.
5. Скоростные характеристики электродвигателя:
Характеристика скорости-момента двигателя определяется как соотношение между скоростью, с которой он работает, и крутящим моментом, который он развивает, то есть ω = f (T).
Практически все электродвигатели — с параллельной обмоткой, с последовательной обмоткой, комбинированные электродвигатели постоянного тока, асинхронные электродвигатели с короткозамкнутым ротором и контактным кольцом, а также электродвигатели с коммутатором переменного тока имеют падающие характеристики скорости-момента, т.е.е., их скорость падает с увеличением момента нагрузки. Однако степень изменения скорости с изменением крутящего момента различается для разных типов двигателей и характеризуется так называемой жесткостью их скоростно-крутящих характеристик.
Моментные характеристики электродвигателя можно разделить на три основные группы:
1. Абсолютно жесткая (плоская) характеристика крутящего момента:
Абсолютно жесткая (плоская) характеристика крутящего момента:
Характеристика, показывающая отсутствие изменения скорости при изменении момента нагрузки.Синхронные двигатели работают с такой характеристикой (горизонтальная прямая I на рис. 1.8).
2. Характеристики жесткого крутящего момента:
Характеристика, показывающая скорость, которая лишь незначительно падает с увеличением крутящего момента. Жесткая характеристика демонстрирует двигатель постоянного тока с параллельной обмоткой, это также верно для асинхронных двигателей в рабочем диапазоне характеристики скорость-момент (кривая II на рис. 1.8).
Характеристика скорости-момента асинхронного двигателя демонстрирует «жесткость», которая различается в зависимости от того, какая точка на характеристике принимается во внимание (рис.1.9). Между точками максимального крутящего момента при работе двигателя T max M и максимального крутящего момента при работе генератора T max G асинхронная машина будет демонстрировать довольно жесткую характеристику.
3. Характеристика плавной скорости:
Характеристика, показывающая значительное падение скорости с увеличением крутящего момента. Электродвигатель постоянного тока с последовательным возбуждением обладает такой характеристикой, особенно на участке характеристики с низким крутящим моментом (кривая III на рис.1.8). Для таких двигателей степень жесткости характеристики изменяется по всей кривой.
Двигатели постоянного тока с комбинированной обмоткой, в зависимости от степени жесткости, отображаемой на их скоростно-крутящих характеристиках, могут рассматриваться как двигатели с жесткими или мягкими характеристиками.
6. Совместная скоростно-крутящая характеристика электродвигателя:
Совместная работа электродвигателя и приводимого им блока, когда скорость имеет постоянное значение, соответствует условию баланса между приводным моментом двигателя и сопротивляющимся моментом, развиваемым ведомым блоком при заданной скорости.Когда крутящий момент сопротивления или нагрузки, развиваемый на валу двигателя ведомым устройством, претерпевает некоторое изменение, скорость и крутящий момент, развиваемые двигателем, изменятся автоматически, чтобы восстановить стабильную работу при новом значении скорости и момента нагрузки.
В случае неэлектрических первичных двигателей (водяная турбина, паровая турбина или дизельный / бензиновый двигатель) баланс между крутящим моментом сопротивления и приводным крутящим моментом достигается за счет использования регулятора соответствующего типа для управления притоком энергии в первичный двигатель посредством увеличение или уменьшение расхода воды, пара или топлива.В электродвигателях роль регулятора автоматики выполняет ЭДС двигателя. Эта способность электродвигателей поддерживать баланс системы привода при изменении крутящего момента сопротивления (нагрузки), развиваемого ведомым устройством, чрезвычайно ценно, поскольку этот крутящий момент очень часто является нестабильным в определенной степени.
Это можно проиллюстрировать с помощью Рис. 1.10, который иллюстрирует характеристику скорость-крутящий момент (кривая III) параллельного двигателя постоянного тока и две характеристики I и II производственной установки, приводимой в движение двигателем (например, конвейера). .
.
Характеристика I соответствует состоянию холостого хода конвейерной установки, в то время как характеристика II соответствует большему уровню момента нагрузки, развиваемого конвейером, когда он обрабатывает требуемый поток материала. Первоначально, когда конвейер работает без нагрузки, крутящий момент двигателя T = T, и двигатель работает со скоростью ω 1 . Как только конвейер начинает поддерживать поток материала, увеличение нагрузки на двигатель тормозит двигатель и снижает его скорость.Это заставляет двигатель развивать меньшую ЭДС.
Следовательно, ток якоря увеличивается, и двигатель начинает развивать больший крутящий момент. Крутящий момент двигателя увеличивается до тех пор, пока не будет достигнута точка баланса, в которой крутящий момент, развиваемый двигателем, равен моменту сопротивления ведомого блока, то есть T = T 2 (где скорость равна ω 2 ). Эта новая точка также является общей как для характеристики II скорость-крутящий момент конвейера, так и для характеристики III скорости-момента двигателя.
При изучении работы двигателя и приводимого им агрегата иногда удобно использовать так называемую совместную характеристику крутящего момента электропривода, кривую, представляющую алгебраическую сумму характеристики крутящего момента и скорости привода. ведомый блок и приводной двигатель.
Характеристики скорости-момента вентилятора и приводного двигателя, а также совместная характеристика крутящего момента двигателя-вентилятора представлены кривыми I, II и III соответственно на рис.1.11.
Когда агрегат достигает постоянной скорости ω с , двигатель работает с крутящим моментом T = момент нагрузки, T L . В таких условиях крутящий момент, указанный на характеристике соединения, будет равен нулю. Работа агрегата на установившейся скорости ω с в этом случае будет считаться стабильной, поскольку любое увеличение скорости приводит к отрицательному изменению (падению) крутящего момента, а любое снижение скорости приводит к положительному изменению (увеличению). в крутящем моменте.
в крутящем моменте.
Кривая III, таким образом, является примером совместной характеристики крутящего момента и скорости привода, который сможет работать стабильно.Если бы характеристика соединения имела форму кривой IV, работа не была бы стабильной, поскольку небольшое увеличение скорости приводит к ускорению, поскольку крутящий момент двигателя превышает крутящий момент нагрузки. С другой стороны, небольшое снижение скорости приводит к замедлению, поскольку крутящий момент двигателя становится меньше крутящего момента нагрузки.
Условия работы привода в установившемся режиме, описанные выше, представляют собой условия, необходимые для статической устойчивости привода, и применимы только тогда, когда скорость и крутящий момент меняются медленно.В периоды кратковременных (быстрых) изменений, связанных с динамической устойчивостью, условия устойчивости привода будут другими.
Обычно, когда электропривод рассчитан на конкретный привод, его скоростно-крутящая характеристика известна заранее.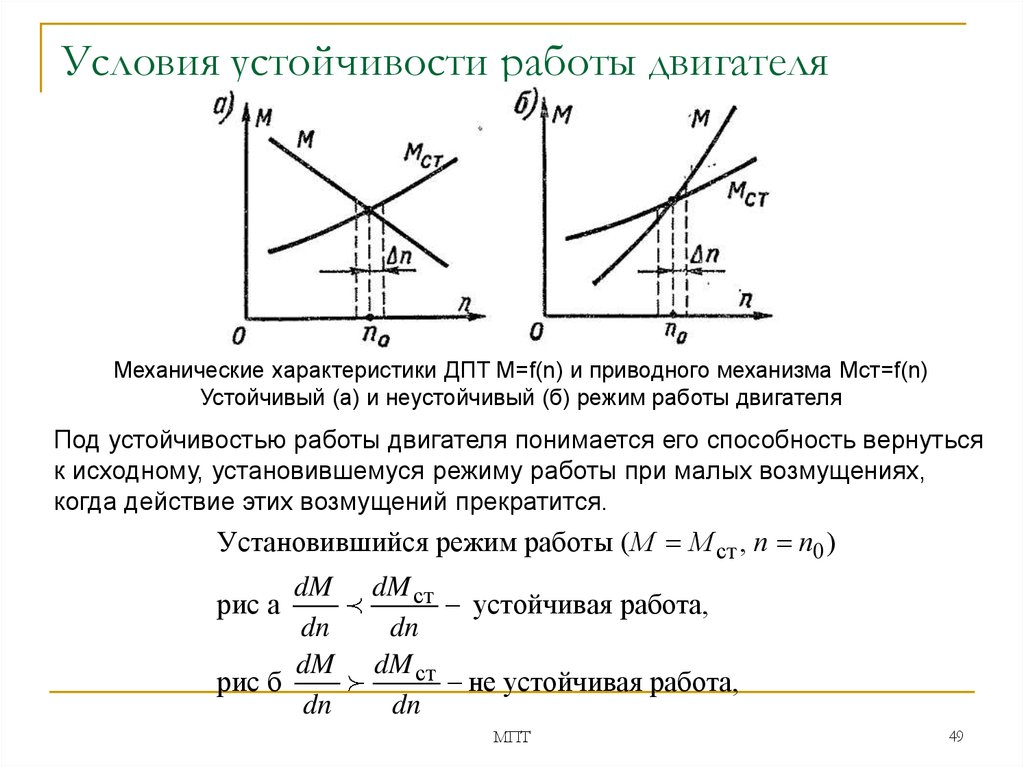 Таким образом, проблема достижения стабильной работы в установившемся режиме при известных скоростях и моментах нагрузки ведомого агрегата состоит в выборе двигателя, характеристика скорости-момента которого будет совместима с характеристикой ведомого агрегата.
Таким образом, проблема достижения стабильной работы в установившемся режиме при известных скоростях и моментах нагрузки ведомого агрегата состоит в выборе двигателя, характеристика скорости-момента которого будет совместима с характеристикой ведомого агрегата.
Этого можно достичь, сначала выбрав подходящий тип двигателя, а затем соответствующим образом изменив электрические параметры его цепей. Иногда для обеспечения требуемых характеристик крутящего момента становится необходимым создание специальных силовых и управляющих цепей для задействованного переключения приводного двигателя и аппаратуры управления.
7. Динамика сочетания двигателя и нагрузки: При поступательном движении активная или движущая сила F d уравновешивается силой сопротивления F r , создаваемой ведомой машиной, и силой инерции m dv / dt, возникающей в результате изменения скорости.Когда вовлеченное тело имеет массу m, выраженную в кг, и скорость v, выраженную в м / с, сила инерции, как и другие силы, будет выражаться в ньютонах (кг-м / с 2 ).
Соответственно, уравнение равновесия сил при перемещении тела можно записать в следующей форме:
Уравнение равновесия крутящего момента при перемещении тела, соответственно, может быть записано в следующей форме:
Вышеупомянутое уравнение. (1.11) показывает, что крутящий момент T M , развиваемый двигателем, уравновешивается моментом сопротивления или нагрузкой T L , приложенным к его валу, и инерционным или динамическим крутящим моментом J (dω / dt). В приведенных выше уравнениях. В формулах (1.10) и (1.11) предполагается, что масса m задействованных тел и полярный момент инерции J привода остаются постоянными, предположение, которое справедливо для большого количества промышленных машин и механизмов. В некоторых приводах возникает необходимость иметь дело с переменным полярным моментом инерции, как в случае кривошипных приводов.
Из анализа уравнения. (1.11) можно определить различные состояния, в которых может оставаться электропривод, вызывающий вращение двигателя:
1. Когда T M > T L , dω / dt> 0, т.е. привод будет испытывать ускорение, в частности, набирая скорость для достижения номинальной скорости.
Когда T M > T L , dω / dt> 0, т.е. привод будет испытывать ускорение, в частности, набирая скорость для достижения номинальной скорости.
2. Когда T M
3. Когда T M = T L , dω / dt = 0, т.е. привод будет работать с постоянной скоростью.
Приведенные выше утверждения, а именно, что когда T M > T L привод ускоряется и что когда T M  В случае, если T M
В случае, если T M
Момент инерции или динамический крутящий момент J (dω / dt) появляется только в переходных условиях, то есть при изменении скорости привода. Во время ускорения привода момент инерции противодействует движению привода, но во время торможения он поддерживает движение привода. Момент инерции, как по величине, так и по знаку, определяется как алгебраическая сумма крутящего момента двигателя и момента сопротивления и нагрузки.
С учетом вышеизложенного, знаки для T M и T L в формуле.(1.11), соответствующие двигательному режиму ведущей машины и моменту пассивной нагрузки (или активному тормозному моменту) соответственно. В общем виде уравнение крутящего момента можно записать как —
Выбор знака, который будет помещен перед каждым крутящим моментом в вышеприведенном уравнении.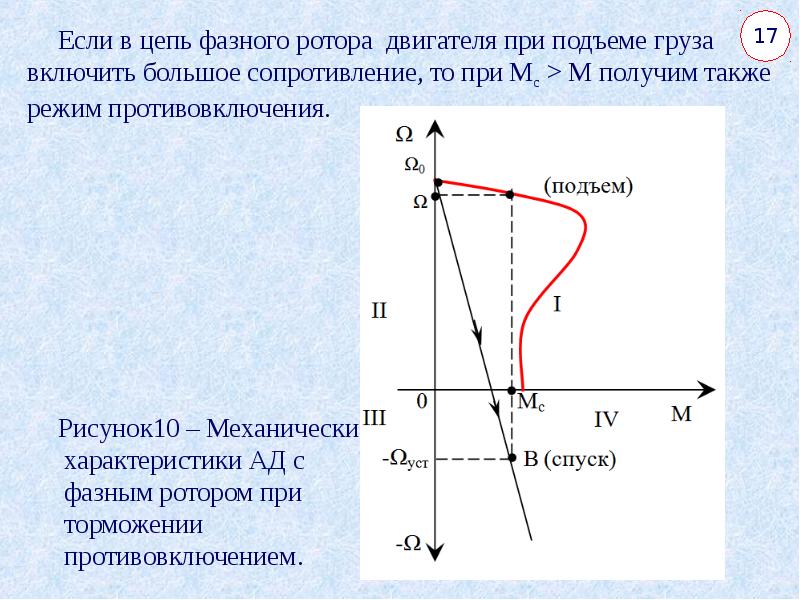 (1.12) зависит от условий эксплуатации и от характера крутящего момента сопротивления или нагрузки. Уравнение движения для привода позволяет определить зависимость крутящего момента, тока, скорости и пути от времени работы в переходных условиях.Все крутящие моменты в уравнении движения должны относиться к некоторому заданному элементу системы. Чаще всего и крутящий момент нагрузки, и динамический крутящий момент относятся к валу двигателя.
(1.12) зависит от условий эксплуатации и от характера крутящего момента сопротивления или нагрузки. Уравнение движения для привода позволяет определить зависимость крутящего момента, тока, скорости и пути от времени работы в переходных условиях.Все крутящие моменты в уравнении движения должны относиться к некоторому заданному элементу системы. Чаще всего и крутящий момент нагрузки, и динамический крутящий момент относятся к валу двигателя.
Пример:
Двигатель подключен к нагрузке, имеющей следующие характеристики:
и. Двигатель: T м = 15 — 0,5ω м
ii. Нагрузка: T л = 0,5ω 2 м
Определите стабильную рабочую точку для этой комбинации.
Решение:
Стабильная работа будет достигнута при-
T м = T л
или 15 — 0,5ω м = 0,5ω м 2
или ω м 2 + ω м — 30 = 0
или ω м = 5 или -6
Без минусовой цифры имеем —
ω м = 5 и T = 12,5
Таким образом, стабильная рабочая точка (12. 5, 5) Отв.
5, 5) Отв.
Двигатель обычно приводит в движение промышленную машину через некую трансмиссионную систему, отдельные части которой работают с разными скоростями. При проведении практических расчетов возникает необходимость привязать крутящие моменты и массы отдельных деталей к какому-нибудь удобному элементу, например, к определенному валу.
Моменты нагрузки могут передаваться от одного вала к другому на основе баланса мощности системы.В этом случае учитываются потери мощности в промежуточных звеньях трансмиссии путем введения соответствующих значений КПД.
Пусть частота вращения вала двигателя ω M , а частота вращения вала данной промышленной машины ω L .
Исходя из равенства потоков мощности, имеем —
или момент нагрузки относительно вала двигателя,
, где T L — крутящий момент нагрузки, η T — КПД трансмиссии, i — передаточное число скоростей, равное ω M / ω L .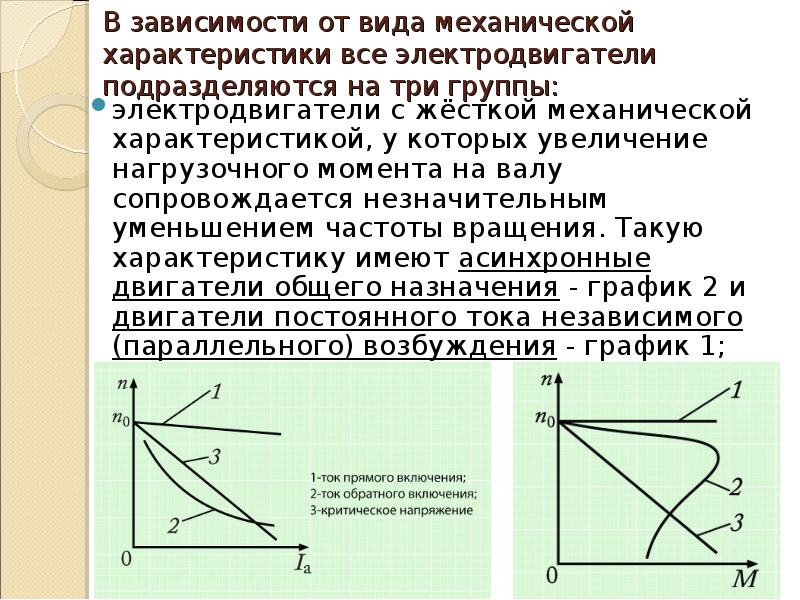
Когда существует несколько ступеней трансмиссии между приводным двигателем и ведомой машиной, как схематично показано на рис. 1.12, с передаточными числами i 1 , i 2 ,…, i n и соответствующими коэффициентами полезного действия трансмиссии η T1 , η T2 …, η Tn , момент нагрузки, относящийся к валу двигателя, задается как —
Моменты инерции относятся к данному валу на основании того, что общее количество кинетической энергии, накопленной в движущихся частях и относящееся к данному валу, остается неизменным.С вращающимися частями, имеющими полярные моменты инерции J M , J 1 , J 2 ,…, J n и угловые скорости ω M , ω 1 , ω 2 , … Ω n (рис. 1.12), их динамическое действие можно заменить действием одного полярного момента инерции, относящегося, например, к валу двигателя, и мы можем записать следующие уравнения:
Пример:
Двигатель передает вращательную нагрузку через редуктор с передаточным отношением зубьев a = 0.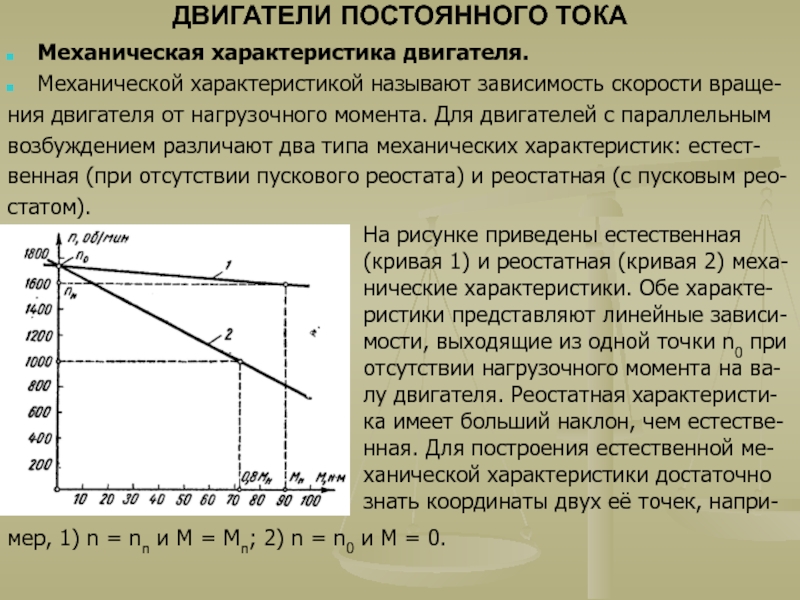 1 и КПД 90%. Груз имеет момент инерции 10 кг-м 2 и крутящий момент 50 Н-м. Двигатель имеет инерцию 0,4 кг-м 2 и работает с постоянной частотой вращения 1400 об / мин. Определите эквивалентную инерцию двигателя и комбинации нагрузки со стороны двигателя и мощность, развиваемую двигателем.
1 и КПД 90%. Груз имеет момент инерции 10 кг-м 2 и крутящий момент 50 Н-м. Двигатель имеет инерцию 0,4 кг-м 2 и работает с постоянной частотой вращения 1400 об / мин. Определите эквивалентную инерцию двигателя и комбинации нагрузки со стороны двигателя и мощность, развиваемую двигателем.
— EEEGUIDE.COM
Характеристики электродвигателя:Машина и нагрузка являются двумя компонентами электромеханической системы преобразования энергии, и характеристики электродвигателя, как правило, играют преобладающую роль в рабочем поведении всей системы.
При выборе электродвигателя необходимо, чтобы его характеристика «скорость-крутящий момент» была известна с достаточной степенью точности, и, кроме того, она должна быть должным образом согласована с характеристиками электродвигателя механической нагрузки. На рис. 5.59 показана характеристика «скорость-момент» асинхронного двигателя с вентиляторной нагрузкой (момент нагрузки примерно пропорционален квадрату скорости). Устойчивая рабочая точка — это точка пересечения P двух характеристик электродвигателя. Как видно из рис.5.59, это стабильная рабочая точка, и система нагрузки машины возвращается к ней при кратковременном воздействии.
Устойчивая рабочая точка — это точка пересечения P двух характеристик электродвигателя. Как видно из рис.5.59, это стабильная рабочая точка, и система нагрузки машины возвращается к ней при кратковременном воздействии.
Они могут быть двух видов. Определенные нагрузки требуют приблизительно постоянной скорости при изменении момента нагрузки, например станки, гидравлические насосы, вентиляторы и т. д. Некоторые особые нагрузки, такие как приводы бумажных фабрик, требуют постоянной скорости независимо от момента нагрузки.
2. Переменная S peed (или постоянная кВт) Нагрузки: Определенные нагрузки, такие как краны, подъемники и другие тяговые приводы, требуют высокого крутящего момента на низких скоростях и низкого крутящего момента на высоких скоростях, так что потребляемая мощность в кВт остается практически постоянной. Этот характер передается нагрузке везде, где требуется ускорение большой инерции.
Этот характер передается нагрузке везде, где требуется ускорение большой инерции.
Они бывают с постоянной регулируемой скоростью, как в некоторых станках, или с переменной регулируемой скоростью, как в кранах.Диапазон регулировки скорости в некоторых приводах может быть очень требовательным.
Характеристики электродвигателя можно классифицировать как: 1. Типы двигателей с постоянной скоростью :Скорость остается постоянной независимо от крутящего момента, как показано на Рис. 5.60 (a). Этой характеристикой электродвигателя обладает синхронный двигатель.
2. Шунт Тип: Здесь скорость двигателя падает на несколько процентов от холостого хода до полной, как показано на рис.5.60 (б). Этой характеристикой обладают как асинхронный двигатель переменного тока (в рабочей области), так и параллельный двигатель постоянного тока.
Здесь скорость резко возрастает при уменьшении момента нагрузки, как показано на Рис. 5.60 (c). Этот тип электродвигателя имеет характеристики двигателя постоянного тока, идеально подходящего для тяговых нагрузок.
Ускоряющие ( запуск, ) и замедляющие ( торможение, ) характеристики мотор-нагрузочных систем также имеют одинаковое значение в их промышленных применениях.Система должна иметь возможность набирать полную скорость из состояния покоя и останавливаться в приемлемый период времени. Эти требования являются строгими при пуске под нагрузкой, а также при быстром торможении и реверсировании в некоторых специальных приложениях (приводы прокатных станов). Двигатель имеет три режима работы: генерирует , двигает и тормозит, . В области генерации он возвращает замедляющуюся промежуточную энергию обратно в электрическую сеть, предотвращая приобретение системой опасно высоких скоростей — например, при опускании подъемника или тяге вниз по градиенту. В области торможения машина поглощает механическую энергию (а также некоторую электрическую энергию) в виде потерь в виде тепла. Двигатель постоянного тока предлагает отличные пусковые и тормозные характеристики, намного превосходящие характеристики асинхронного двигателя переменного тока.
В области торможения машина поглощает механическую энергию (а также некоторую электрическую энергию) в виде потерь в виде тепла. Двигатель постоянного тока предлагает отличные пусковые и тормозные характеристики, намного превосходящие характеристики асинхронного двигателя переменного тока.
Как и в случае двигателей, рабочая точка системы генератор-нагрузка определяется характеристиками электродвигателя двух, как показано на рис. 5.61 для шунтирующего генератора постоянного тока. Аналогично обстоит дело с генераторами переменного тока (синхронными).В современных системах генераторы, работающие с параллельной подачей нагрузки, распределяются по географически обширным территориям через линии электропередачи. Система должна соответствовать требованию практически постоянного напряжения, поскольку нагрузка изменяется в широком диапазоне. Невыполненный генератор, питающий один двигатель, используется в определенных схемах управления скоростью, в которых может потребоваться изменение напряжения на клеммах особым образом.
Таким образом, можно видеть, что среди характеристик большое значение имеют характеристика крутящего момента двигателя и ВАХ генератора.Не менее важными могут быть пределы, в которых можно изменять эти характеристики.
Характеристики двигателей постоянного тока | electricaleasy.com
Обычно для двигателей постоянного тока важными считаются три характеристические кривые: (i) крутящий момент в зависимости от тока якоря, (ii) скорость в зависимости от тока якоря и (iii) скорость в зависимости от крутящего момента. Они объясняются ниже для каждого типа двигателя постоянного тока. Эти характеристики определяются с учетом следующих двух соотношений.T a ∝ ɸ.I a и N ∝ E b / ɸ
Эти уравнения можно изучить при — ЭДС и уравнение крутящего момента машины постоянного тока. Для двигателя постоянного тока величина обратной ЭДС определяется тем же уравнением ЭДС генератора постоянного тока, то есть E b = PɸNZ / 60A.
 Для станка P, Z и A постоянны, поэтому N ∝ E b / ɸ
Для станка P, Z и A постоянны, поэтому N ∝ E b / ɸ Характеристики двигателей постоянного тока серии
Зависимость крутящего момента от тока якоря (T
a -I a ) Эта характеристика также известна как электрическая характеристика .Мы знаем, что крутящий момент прямо пропорционален произведению тока якоря и магнитного потока поля, T a .I a . В двигателях постоянного тока обмотка возбуждения включена последовательно с якорем, т.е. I a = I f . Следовательно, до магнитного насыщения поля поток ɸ прямо пропорционален Ia. Следовательно, до магнитного насыщения Ta α Ia 2 . Следовательно, кривая Ta-Ia является параболой для меньших значений Ia.После магнитного насыщения полюсов поля поток не зависит от тока якоря Ia.Следовательно, крутящий момент изменяется пропорционально только Ia, T ∝ Ia. Следовательно, после магнитного насыщения кривая Ta-Ia становится прямой.
Крутящий момент на валу (Tsh) меньше крутящего момента якоря (Ta) из-за паразитных потерь. Следовательно, кривая Tsh vs Ia лежит несколько ниже.
В двигателях серии постоянного тока (до магнитного насыщения) крутящий момент увеличивается пропорционально квадрату тока якоря, эти двигатели используются там, где требуется высокий пусковой момент.
Скорость в зависимости от тока якоря (N-Ia)
Мы знаем соотношение, N ∝ E b / ɸПри малом токе нагрузки (и, следовательно, при малом токе якоря) изменение обратной ЭДС Eb мало, и им можно пренебречь.Следовательно, при малых токах скорость обратно пропорциональна ɸ. Как известно, поток прямо пропорционален Ia, скорость обратно пропорциональна Ia. Следовательно, когда ток якоря очень мал, скорость становится опасно высокой. Это , почему нельзя запускать серийный двигатель без некоторой механической нагрузки .
Но при больших нагрузках ток якоря Ia велик. Следовательно, скорость мала, что приводит к уменьшению обратной ЭДС Eb.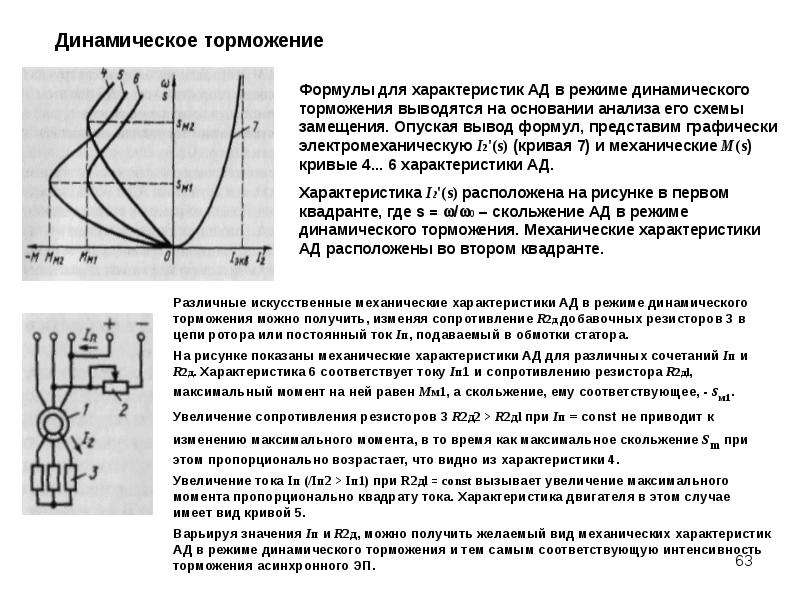 Из-за уменьшения Eb допускается больший ток якоря.
Из-за уменьшения Eb допускается больший ток якоря.Скорость в зависимости от крутящего момента (N-Ta)
Эта характеристика также называется механической характеристикой . Из двух приведенных выше характеристик двигателя постоянного тока можно обнаружить, что при высокой скорости крутящий момент низкий, и наоборот.Характеристики параллельных двигателей постоянного тока
Крутящий момент в зависимости от тока якоря (Ta-Ia)
В случае параллельных двигателей постоянного тока можно считать, что поток поля постоянный. Хотя при больших нагрузках ɸ уменьшается незначительно из-за повышенной реакции якоря.Поскольку мы пренебрегаем изменением потока, мы можем сказать, что крутящий момент пропорционален току якоря. Следовательно, характеристика Ta-Ia для шунтирующего двигателя постоянного тока будет прямой линией, проходящей через начало координат.Поскольку для большой пусковой нагрузки требуется большой пусковой ток, нельзя запускать параллельный двигатель при большой нагрузке .
Скорость в зависимости от тока якоря (N-Ia)
Поскольку поток ɸ считается постоянным, можно сказать, что N ∝ Eb. Но поскольку обратная ЭДС также почти постоянна, скорость должна оставаться постоянной.Но практически, как и Eb, уменьшается с увеличением нагрузки. Обратная ЭДС Eb уменьшается чуть больше, поэтому скорость немного уменьшается. Обычно скорость снижается только на 5–15% от скорости полной нагрузки. Следовательно, подмешивающий двигатель можно рассматривать как двигатель с постоянной скоростью . На следующем рисунке на графике зависимости скорости от тока якоря прямая горизонтальная линия представляет идеальную характеристику, а фактическая характеристика показана пунктирной линией.Характеристики составного двигателя постоянного тока
Составные двигатели постоянного тока имеют как последовательную, так и параллельную обмотку.В составном двигателе, если последовательная и шунтирующая обмотки соединены таким образом, что последовательный поток имеет направление, совпадающее с направлением шунтирующего потока, то двигатель называется совокупно составным. И если последовательный поток противоположен направлению шунтирующего потока, то двигатель называется дифференциально составным. Характеристики обоих этих составных двигателей объясняются ниже.
И если последовательный поток противоположен направлению шунтирующего потока, то двигатель называется дифференциально составным. Характеристики обоих этих составных двигателей объясняются ниже. (а) Накопительный составной двигатель
Кумулятивные составные двигатели используются там, где требуются последовательные характеристики, но нагрузка, вероятно, будет полностью снята.Последовательная обмотка справляется с большой нагрузкой, в то время как шунтирующая обмотка предотвращает работу двигателя на опасно высокой скорости при внезапном снятии нагрузки. В этих двигателях обычно используется маховик, к которому применяются внезапные и временные нагрузки, как в прокатных станах.
(b) Дифференциальный мотор-редуктор
Поскольку в двигателях с дифференциальным полем последовательный поток противостоит шунтирующему потоку, общий поток уменьшается с увеличением нагрузки. Благодаря этому скорость остается почти постоянной или даже может немного увеличиваться с увеличением нагрузки (N ∝ E b / ɸ).
 Дифференциальные составные двигатели обычно не используются, но они находят ограниченное применение в экспериментальных и исследовательских работах.
Дифференциальные составные двигатели обычно не используются, но они находят ограниченное применение в экспериментальных и исследовательских работах. (PDF) Анализ механических характеристик и определение зависимости мощности двигателя постоянного тока
534 Hao Hu / Procedure Engineering 15 (2011) 531-535
3.1 Метод и этапы проверки
Калибровка двигателя постоянного тока, который включает определение потерь мощности в зависимости от скорости и крутящего момента, для
требуются следующие тесты:
1) Калибруемая машина механически соединяется с другой машиной и приводится в действие ею.Желательно, чтобы эта машина
была откалибрована или имела известные характеристики, но если доступны точные инструменты, подойдет любой двигатель постоянного тока, способный приводить в движение испытательную машину
. Ведущая машина должна иметь номинальную мощность, превышающую ожидаемые потери
на испытательной машине (обычно не менее 15% от номинальной выходной мощности испытательной машины). Эта машина будет называться
Эта машина будет называться
как «приводная» машина в последующем обсуждении.
2) Приводная машина работает как двигатель, не связанный с испытательной машиной, во всем диапазоне скоростей, который будет использоваться для
испытательной машины.Измеряется входная мощность в выбранной точке скорости.
3) Приводной двигатель и испытательная машина механически связаны. Испытательная машина приводится в движение во всем диапазоне скоростей, и
входной сигнал приводного двигателя измеряется в каждой точке скорости. Разница между мощностью, потребляемой для привода двигателя при
для каждой точки скорости, определенной на этапах (2) и (3), представляет собой механические потери тестового двигателя. Построение этих точек в виде функции скорости
дает механические потери испытательного двигателя как функцию скорости.При необходимости механические потери могут быть разделены на компоненты жгута
путем выполнения этого испытания дважды: во-первых, с поднятыми щетками испытательной машины
, что дает потери на лобовое сопротивление и трение подшипников испытательной машины; и, во-вторых, с щетками, установленными на коммутаторе
, что дает общие механические потери. Разница между этими двумя испытаниями заключается в потерях
Разница между этими двумя испытаниями заключается в потерях
механической щетки на трение
.
[4]
4) Испытание, описанное в шаге (3) выше, повторяется с током возбуждения испытательной машины, установленным на заданное значение.
В дополнение к мощности, подаваемой на приводной двигатель, теперь должны быть измерены ток возбуждения и напряжение якоря на испытательной машине
. Разница между мощностью, подаваемой на приводной двигатель, измеренной на этом этапе, и мощностью, измеренной на этапе
(3), в каждой точке скорости, представляет собой магнитные потери испытательной машины для заданного значения тока возбуждения. Этот шаг
следует повторить для нескольких различных значений тока возбуждения, достаточных для значений тока возбуждения, чтобы охватить диапазон работы испытательной машины
, поскольку она используется как «калиброванная» машина.
5) Необходимо получить точное значение сопротивления якоря испытательной машины.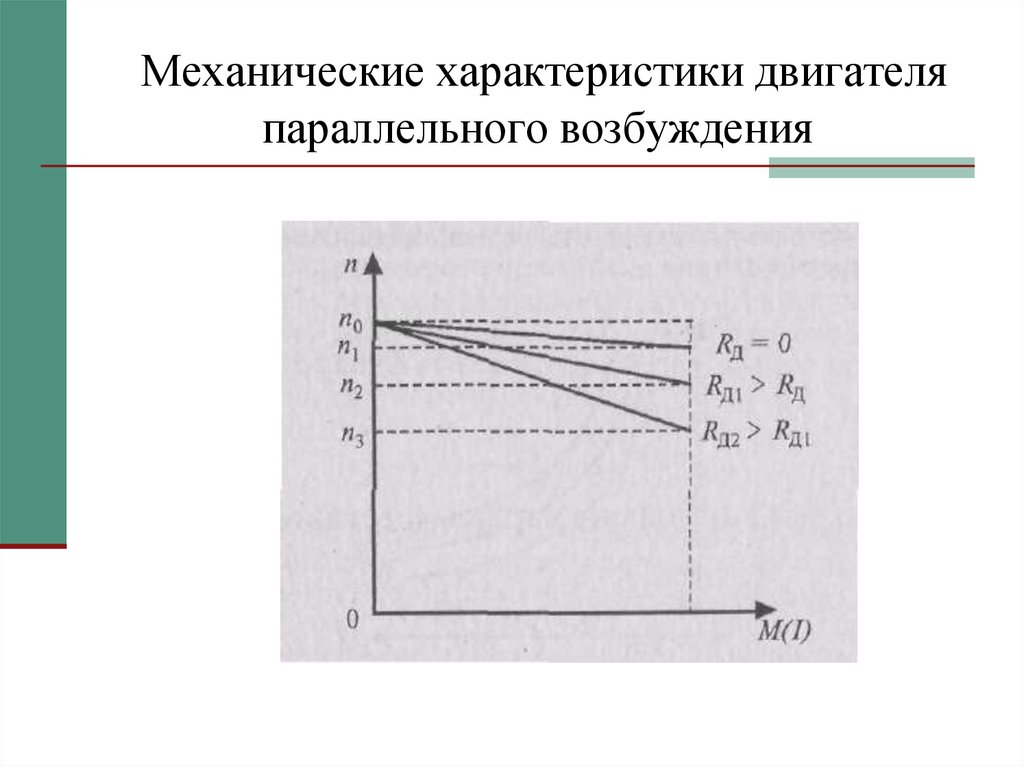 Это может включать или не включать
Это может включать или не включать
сопротивление контакту с щеткой, в зависимости от факторов, обсуждаемых в связанных ссылках. Должны быть известны зависимости сопротивления якоря от
температурных характеристик и сопротивления щеточному контакту. Это довольно просто.
для самой обмотки якоря, если известен материал проводника. Если электрические потери щеток нужно рассматривать
независимо от потерь в обмотке якоря, что часто делается для силовых машин с графитовыми щетками » ,
необходимо измерить падение напряжения на контакте щетки в зависимости от тока якоря.В небольших машинах или машинах
с металлическими графитовыми щетками сопротивление контакта щетки обычно может быть объединено с сопротивлением обмотки якоря
, а сопротивление, измеренное на выводах якоря, может использоваться для расчета электрических потерь якоря
. . Температурные изменения сопротивления сделаны, в этом случае принимая характеристики материала проводника обмотки
.
[4] [5]
6) Последний этап включает измерение потерь от паразитной нагрузки.Как отмечалось выше, в небольших машинах эта потеря
часто игнорируется. Чтобы определить, значительна ли эта потеря, можно использовать следующий тест: Тестовая машина приводится в движение приводным двигателем
с заданной скоростью, как и в предыдущих шагах. При возбуждении нулевым полем цепь якоря
замкнута накоротко. Небольшой ток якоря обычно возникает из-за остаточного магнетизма. Медленно и осторожно увеличивайте возбуждение поля от нуля до значения, при котором протекает номинальный ток якоря.Измерьте ток якоря, ток возбуждения
и входную мощность приводного двигателя. Рассчитайте потери якоря
2
r и потери в щетке для номинального тока якоря
по значению сопротивления, определенному на шаге (5), сделав поправки на повышение температуры якоря, как показано.
Определите механические потери и магнитные потери испытательного двигателя для скорости и тока возбуждения, используемых на основе данных
(PDF) Электрические и механические характеристики высокоскоростного двигателя для электрических турбонагнетателей в зависимости от эксцентриситета
Энергия 2021, 14, 3340 13 из 14
PM Постоянный магнит
PMSM Синхронные двигатели с постоянными магнитами
PWM Широтно-импульсная модуляция
SE Статический эксцентриситет
SPMSM Накладные синхронные двигатели с постоянными магнитами
SRM Импульсные электродвигатели SVP
с векторным сопротивлением модуляция ширины
Турбокомпрессор TEDC с дополнительным компрессором с электроприводом
UMP Несбалансированный магнитный привод
VGT Турбонагнетатель с изменяемой геометрией
Каталожные номера
1.
Lee, W .; Schubert, E .; Li, Y .; Li, S .; Bobba, D .; Сарлиоглу Б. Обзор электрического турбокомпрессора и нагнетателя для уменьшенных двигателей внутреннего сгорания
. IEEE Trans. Трансп. Electrif. 2017,3, 36–47. [CrossRef]
2. Hiereth, H .; Преннингер, П. Зарядка двигателя внутреннего сгорания, 1-е изд .; Springer: Вена, Австрия, 2003 г .; С. 1–4.
3.
Yamashita, Y .; Ибараки, S .; Sumida, O .; Ebisu, K.I .; An, I.L .; Огита И. Разработка электрического нагнетателя для уменьшения габаритов автомобильных двигателей
.Митсубиси Хэви Инд. Тех. Ред. 2010 г., 47, 7–12.
4. Gödeke, H .; Преведел, К. Гибридный турбокомпрессор с инновационным электродвигателем. МТЗ Worldw. 2014,75, 26–31. [CrossRef]
5.
Ibaraki, S .; Yamashita, Y .; Сумида, К .; Ogita, H .; Джиннаи, Ю. Разработка «гибридного турбонагнетателя», турбонагнетателя с электрическим усилителем.
Мицубиси Хэви Инд. Тех. Ред. 2006, 43, 1–5.
6.
Woollenweber, W.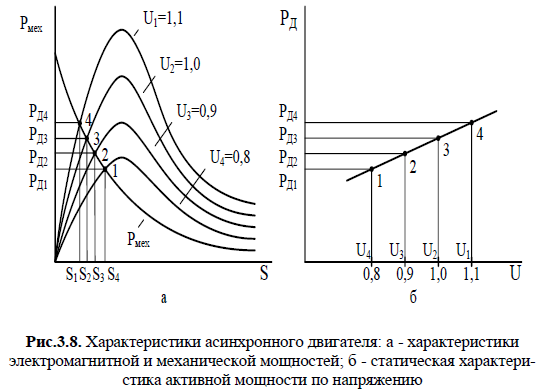 E .; Халими, Э.М. Системы турбонаддува с мотор-генератором для использования с двигателями внутреннего сгорания
E .; Халими, Э.М. Системы турбонаддува с мотор-генератором для использования с двигателями внутреннего сгорания
и методы управления для них.Патент США US 58A, 25 мая 1999 г.
7.
Arnold, S .; Балис, С .; Barthelet, P .; Poix, E .; Самад, Т .; Hampson, G .; Шахед, С. Программа систем электрического наддува Garrett (EBS).
Honeywell Turbo Technol. 2005. Доступно в Интернете: https://www.osti.gov/servlets/purl/
1 (по состоянию на 1 июня 2021 г.).8. Хофбауэр П. Метод управления турбонагнетателем с электрическим приводом. Патент США US20110022289A1, 27 января 2011 г.
9. Симидзу М. Турбокомпрессор с электродвигателем.Патент США US8882478B2, 11 ноября 2014 г.
10. Гилл, Н. Движение экологически чистых технологий. В материалах конференции Cleantech Forum Europe 2012, Мюнхен, Германия, 16–18 апреля 2012 г.
11.
Breitbach, H .; Metz, D .; Weiske, S .; Спиннер, Г. Применение и дизайн eBooster от BorgWarner; BorgWarner Turbo System
GmbH: Auburn Hills, MI, USA, 2015.
12.
Biwersi, S .; Tavernier, S .; Equoy, S. Электрический компрессор с высокоскоростным бесщеточным двигателем постоянного тока.МТЗ Worldw.
2012
, 73, 50–53.
[CrossRef]
13.
Menegazzi, P .; Wu, Y .; Томас В. Конструкция электрического нагнетателя для двигателей малой мощности. МТЗ Worldw.
2013
, 74, 36–41.
[CrossRef]
14.
Noguchi, T .; Кано, М. Разработка двигателя с постоянным магнитом мощностью 150 000 об / мин, 1,5 кВт для автомобильного нагнетателя. In
Proceedings of the 2007 PEDS, Бангкок, Таиланд, 27–30 ноября 2007 г .; стр.183–188.
15.
Heidrich, T .; Людвиг, Ф .; Моекель А. Исследование высокоскоростного привода турбомашин. In Proceedings of the Innovative
Small Drives and Micro-Motor Systems, 11-й GMM / ETG-симпозиум, Саарбрюккен, Германия, 27–28 сентября 2017 г .; С. 1–5.
16.
Лим, М.-С .; Kim, J.-M .; Hwang, Y.S .; Хонг, Ж. -П. Конструкция сверхскоростного двигателя с постоянными магнитами для электрического турбокомпрессора
-П. Конструкция сверхскоростного двигателя с постоянными магнитами для электрического турбокомпрессора
с учетом скоростных характеристик.IEEE / ASME Trans. Мехатрон. 2017 г., 22, 774–784. [CrossRef]
17.
Hong, D.K .; Ли, T.W .; Jeong, Y.H. Конструкция и экспериментальная проверка высокоскоростного электродвигателя с турбонаддувом с учетом
изменения отношения L / D. IEEE Trans. Magn. 2018,54, 1–4.
18.
Lee, W .; Kim, J.H .; Choi, W .; Сарлиоглу Б. Метод контроля минимизации пульсаций крутящего момента высокоскоростного однофазного бесщеточного двигателя
постоянного тока для электрического турбокомпрессора. IEEE Trans.Veh. Technol. 2018,67, 10357–10365. [CrossRef]
19.
Zhao, D .; Stobart, R .; Мейсон, Б. Управление энергопотреблением электрического турбокомпрессора в реальном времени на основе явной модели управления с прогнозированием
. IEEE Trans. Ind. Electron. 2020,67, 3126–3137. [CrossRef]
20.
Tran, H.H .; Ричард, B .; Gray, K .; Холл, Дж. М. Разработка технических характеристик электрического нагнетателя, удовлетворяющих диапазону
бензиновых двигателей уменьшенных размеров. В материалах Всемирного конгресса и выставки SAE 2016, Детройт, штат Мичиган, США,
, 12–14 апреля 2016 г.
21.
Baek, S .; Woo, S .; Kim, Y .; Ли, К. Прогнозирование характеристик дизельного двигателя с турбонаддувом, оснащенного электрическим нагнетателем
, с использованием одномерного моделирования. Energy 2019, 185, 213–228. [CrossRef]
22.
Lee, T.W .; Baek, S.J .; Ли, К. Моделирование и испытания двигателя с учетом экспериментального двигателя Проверка электрического турбонагнетателя для дизельного двигателя
1,6 л. IEEE Trans. Трансп. Electrif. на рассмотрении.
23.
Хофманн, М.; Eckardt, B .; Хекель Т. Инверторная технология для высокоскоростных приводов, таких как электрические турбокомпрессоры. В материалах
IKMT 2015, 10. Симпозиум ETG / GMM «Инновационные малые приводы и микромоторные системы», Кельн, Германия, 14–15 сентября
2015; С. 1–6.
24.
Мердзан, М .; Paulides, J.J.H .; Ломонова, Е.А. Сравнительный анализ потерь ротора в высокоскоростных машинах с постоянными магнитами
, скобы с различными конфигурациями обмоток с учетом влияния ШИМ инвертора.В материалах десятой Международной конференции
2015 года по EVER, Монте-Карло, Монако, 31 марта — 2 апреля 2015 г .; С. 1–8.
Механические характеристики трехфазных асинхронных двигателей с однофазным питанием.
Страница / Ссылка:
URL страницы: HTML-ссылка: ОБЩИЕ СВОЙСТВА ЭЛЕКТРОДВИГАТЕЛЕЙ (Двигатели и Приводы) Все электродвигатели подчиняются законам электромагнетизма и, по сути, подчиняются тем же ограничениям, которые накладываются материалами (медью и железом), из которых они сделаны. Поэтому мы не должны удивляться, обнаружив, что на фундаментальном уровне все двигатели — независимо от типа — имеют много общего.
Этим общим свойствам, большинство из которых было затронуто в этой теме, обычно не уделяется особого внимания. темы, как правило, концентрируются на различиях между типами двигателей, и производители обычно заинтересованы в продвижении достоинств своего конкретного двигателя за счет конкуренции. Этот разделяющий акцент заставляет скрывать основополагающее единство, оставляя пользователям мало возможностей усвоить знания, которые позволят им делать обоснованные суждения.
Наиболее полезные идеи, о которых стоит помнить, приведены ниже с краткими примечаниями к каждой из них. Опыт показывает, что пользователи, которые твердо придерживаются этих основных идей, обнаружат, что способны понять, почему один двигатель кажется лучше другого, и будут чувствовать себя намного увереннее, столкнувшись со сложной задачей взвешивания плюсов и минусов конкурирующих типов.
Система охлаждения является самым важным фактором при определении мощности любого данного двигателя.
Пластина 1.2 Асинхронный двигатель со стальной рамой и сепаратором, 150 кВт (201 л.с.), 1485 об / мин. Активные части полностью закрыты, и охлаждение обеспечивается с помощью внутреннего вентилятора, который циркулирует охлаждающий воздух внутри двигателя через полые ребра, и внешнего вентилятора, который обдувает корпус воздухом. (Фотография любезно предоставлена Бруком Кромптоном.)
Любой двигатель будет выдавать больше мощности, если его электрическая цепь будет работать интенсивнее (т.е. если позволить току увеличиваться).Ограничивающим фактором обычно является допустимое превышение температуры обмоток, которое зависит от класса изоляции.
Для изоляции класса F (наиболее широко используемой) допустимое повышение температуры составляет 100 K, тогда как для класса H оно составляет 125 K. Таким образом, если охлаждение останется прежним, можно получить большую мощность, просто используя изоляцию более высокого класса. В качестве альтернативы, с данной изоляцией мощность может быть увеличена, если улучшена система охлаждения. Например, двигатель с сквозной вентиляцией может дать, возможно, вдвое большую выходную мощность, чем идентичный в остальном, но полностью закрытый механизм.
Крутящий момент на единицу объема
Для двигателей с аналогичными системами охлаждения номинальный крутящий момент приблизительно пропорционален объему ротора, который, в свою очередь, приблизительно пропорционален общему объему двигателя.
Это связано с тем, что для данного устройства охлаждения удельные и магнитные нагрузки машин разных типов будут более
или менее одинаковыми. Таким образом, крутящий момент на единицу длины зависит в первую очередь от квадрата диаметра, поэтому можно ожидать, что двигатели примерно одинакового диаметра и длины будут производить примерно одинаковый крутящий момент.
Выходная мощность на единицу объема прямо пропорциональна скорости.
Тихоходные двигатели непривлекательны, потому что они большие, а значит, и дорогие. Обычно гораздо лучше использовать быстроходный двигатель с механическим понижением скорости. Например, двигатель с прямым приводом для переносной электрической отвертки был бы абсурдным предложением.
Большие двигатели имеют более высокий удельный крутящий момент (крутящий момент на единицу объема) и более эффективны, чем малые.
В больших двигателях удельная электрическая нагрузка обычно намного выше, чем в маленьких, а удельная магнитная нагрузка несколько выше. Эти два фактора вместе дают более высокий удельный крутящий момент.
Очень маленькие двигатели по своей природе очень неэффективны (например, 1% в наручных часах), тогда как двигатели, скажем, более 100 кВт имеют КПД выше 95%. Причины этого масштабного эффекта сложны, но они проистекают из того факта, что член падения напряжения на сопротивлении может быть относительно небольшим в больших электромагнитных устройствах, тогда как в малых устройствах сопротивление становится доминирующим термином.
КПД и скорость
КПД двигателя повышается с увеличением скорости.
При заданном крутящем моменте выходная мощность возрастает прямо пропорционально скорости, в то время как электрические потери, вообще говоря, постоянны. В этих условиях эффективность растет со скоростью.
Двигатель может быть рассчитан на любое напряжение.
В определенных пределах всегда можно перемотать двигатель на другое напряжение, не влияя на его характеристики.Двигатель на 200 В, 10 А можно перемотать на 100 В, 20 А, просто использовав вдвое меньше витков на катушку провода, имеющего вдвое большую площадь поперечного сечения. Общее количество активного материала и, следовательно, характеристики будут такими же.
Большинство двигателей можно без повреждений на короткое время перегрузить.
Непрерывная электрическая нагрузка (т.е. ток) не может быть превышена без повреждения изоляции, но если двигатель работал с пониженным током в течение некоторого времени, допустимо, чтобы ток (и, следовательно, крутящий момент) был намного больше обычного. на короткий период времени.Основными факторами, влияющими на величину и продолжительность допустимой перегрузки, являются тепловая постоянная времени (которая определяет скорость повышения температуры) и предыдущий режим работы. Температурные постоянные времени варьируются от нескольких секунд для маленьких двигателей до многих минут или даже часов для больших.