


Узнать мощность электродвигателя по диаметру вала без бирки
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Заказать новый электродвигатель по телефону
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
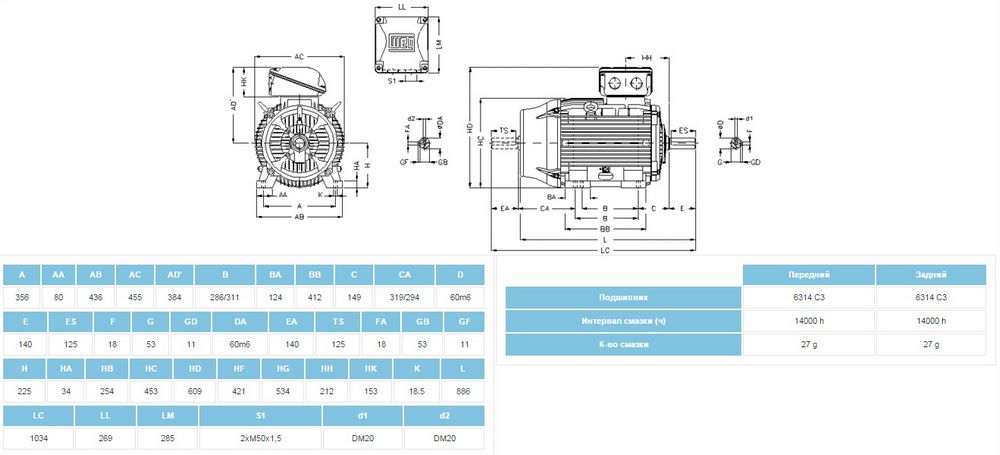
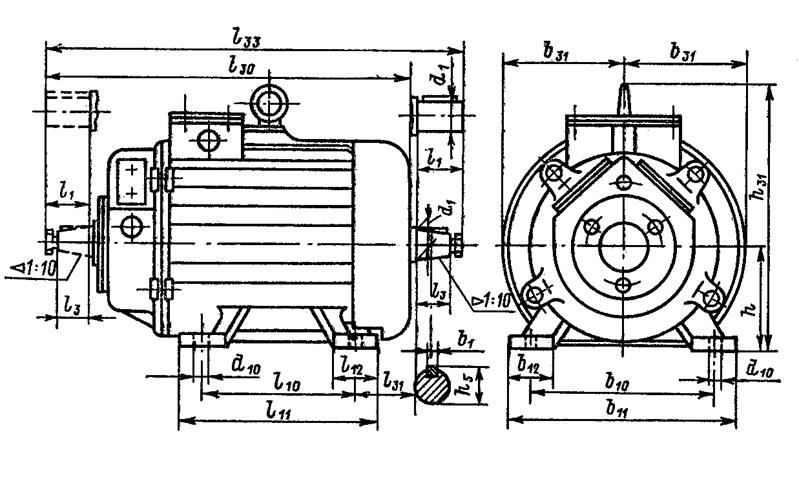
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
Какие размеры необходимо замерить:
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 100 | АИР315S2, АИР315S4, АИР355S6 | ||
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 | |||
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
Для начала нужно подключить двигатель к сети и замерить показатели напряжения. Замеряем потребляемый ток на каждой из обмоток фаз с помощью амперметра или мультиметра. Далее, находим сумму токов трех фаз и умножаем на ранее замеренные показатели напряжения, наглядно в формуле расчета мощности электродвигателя по току.
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об.
- АИР 180 М2 – где 2 это 3000 оборотов.
- АИР 180 М4 – 4 это 1500 об. мин.
- АИР 180 М6 – 6 обозначает частоту вращения 1000 об/мин.
- АИР 180 М8 – 8 означает, что частота вращения выходного вала 750 оборотов.
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
✔ Как узнать мощность электродвигателя?
Чаще всего мощность двигателя обозначена в техническом паспорте к устройству и продублирована на корпусе, где есть специальная наклейка или планка с основными техническими параметрами.
Однако нередко случается, что данные на корпусе являются не читаемыми, а технический паспорт давно утерян.
Как же в таком случае выяснить параметры мощности электромотора?
Определение по счетчику:
При отсутствии маркировки на корпусе электромотора можно вычислить его мощность несколькими способами.
Вычисление по таблицам:
Другим способом определения мощности мотора является расчет по данным из таблиц. Для этого понадобится измерить диаметр вала, длину мотора без учета выступающей части вала, а также расстояние до оси. По этим параметрам можно выяснить, к какой серии относится данный мотор, и найти его технические характеристики, в том числе мощность. В сети можно отыскать технические таблицы по двигателям постоянного и переменного тока, где по найденному значению легко отыскать тип устройства и его мощность.
Вычисление по габаритам:
По данному способу необходимо провести следующие действия:
- Измерить диаметр сердечника в статоре по внутренней части, а также длину с учетом отверстий вентиляции.
 Значение выражается в сантиметрах.
Значение выражается в сантиметрах. - Вычислить частоту сети, к которой подключен электродвигатель, и синхронную частоту валового вращения.
- Узнать показатель полюсного деления: для этой цели диаметр сердечника умножается на синхронную частоту вращения вала, а найденное значение умножается на 3,14 и делится на частоту сети, умноженное на 120.
 Значение выражается в сантиметрах.
Значение выражается в сантиметрах.
Формула вычисления постоянного полюсного значения:
- Найти число полюсов, перемножив частоту тока на 60 и разделив на частоту валового вращения.
- Найденное число умножить на 2, после чего обратиться к таблице по определению зависимости константы от числа полюсов и выявить соответствующий показатель.
- Найденную постоянную величину умножают на квадрат от диаметра сердечника, длину и частоту вращения вала, после чего результат умножается по нижеприведенной формуле:
Найденное значение выражается в кВт.
Вычисление мощности, выдаваемой электродвигателем.
Для вычисления реального показателя мощности, с которой работает электродвигатель, необходимо найти скорость валового вращения, выражаемую в числе оборотов за секунду, тяговое усилие мотора. Частота вращения умножается последовательно на 6,28, показатель силы и радиус вала, который можно вычислить при помощи штангенциркуля. Найденное значение мощности выражается в ваттах.
Определяем потребляемый ток:
Для тех, кому надо знать не только мощность, но и объем потребляемого тока, также есть несколько способов получения таких данных. Для каждого из них важным критерием в процессе определения является количество фаз.
Если у вас однофазная сеть, разделите показатель мощности на значение напряжения.
Если двигатель 3-фазный, схема подсчета еще проще: удвойте значение мощности — это и будет показатель в Амперах.
Как вы убедились, узнать мощность двигателя и потребляемый ток, даже если эти данные утеряны, достаточно просто. Выбирайте самый простой для вас способ решения проблемы и пусть ваша техника всегда работает исправно и имеет высокий КПД!
Выбирайте самый простой для вас способ решения проблемы и пусть ваша техника всегда работает исправно и имеет высокий КПД!
Cравнение электродвигателей ГОСТ и DIN по размерам вала и фланца
Cравнение электродвигателей ГОСТ и DINВажным фактором любого производства является его бесперебойная и стабильная работа. Учитывая наличие различных механизмов, для их привода нередко требуются электродвигатели различных мощностей, модификаций и установочных размеров. И когда по различным причинам электромоторы выходят из строя, требуется незамедлительная замена агрегата. В большинстве случаев технический персонал предприятия прибегает к перемотке электродвигателей, о нецелесообразности этого метода решения проблем мы писали в этой статье. Гораздо эффективнее будет приобретение нового мотора на замену аварийному агрегату. Однако, не всегда удается найти нужный двигатель в наличии в своем городе, а то и в России. Это касается случаев, когда электродвигатель изготовлен по европейскому стандарту DIN, а если этот двигатель еще к примеру, с электромагнитным тормозом, с энкодером или взрывозащищенного исполнения, то «удачи не видать».
Это касается случаев, когда электродвигатель изготовлен по европейскому стандарту DIN, а если этот двигатель еще к примеру, с электромагнитным тормозом, с энкодером или взрывозащищенного исполнения, то «удачи не видать».
Здесь мы рассмотрим взаимозаменяемость электродвигателей стандарта DIN и ГОСТ, соотношение их присоединительных размеров в зависимости от их основных параметров – высоты до центра вала, мощности и количества полюсов. Ниже вы видите таблицу, в которой наглядно можно посмотреть эти параметры. В этом смысле сравнение эл двигателей этих двух установочных стандартов будет наиболее актуальным при подборе аналога импортному мотору.
Скачать таблицу можно по этой ссылке
Итак, в верхних колонках ГОСТ и IEC(DIN) указаны электродвигатели, распределенные по их габаритам, то есть высоты оси их вращения, или высоты до центра их вала. В средних колонках по вертикали указаны мощность электродвигателей и количество их полюсов, к примеру, в первой колонке рассматриваются АИР56 по ГОСТ и АИС56 по DIN. АИР56 0,18-2 будет означать АИР56В4 0,18 кВт на 3000 оборотов. То есть вторая цифра 2,4,6 или 8 означает количество полюсов двигателя или его оборотов: 3000, 1500, 1000 и 750 соответственно, а первая цифра говорит о мощности электродвигателя. И, наконец, последние по вертикали две колонки это диаметры валов двигателей и наружный размер их фланцев.
АИР56 0,18-2 будет означать АИР56В4 0,18 кВт на 3000 оборотов. То есть вторая цифра 2,4,6 или 8 означает количество полюсов двигателя или его оборотов: 3000, 1500, 1000 и 750 соответственно, а первая цифра говорит о мощности электродвигателя. И, наконец, последние по вертикали две колонки это диаметры валов двигателей и наружный размер их фланцев.
Таким образом, к электродвигателю DIN можно оперативно подобрать электродвигатель ГОСТ, соответствующий по мощности, количеству полюсов и основному присоединительному размеру. Конечно, это не всегда получиться сделать, но, тем не менее «выход есть всегда» как говорил Барон Мюнхгаузен.
Электродвигатель АИР характеристики
| Тип двигателя | Р, кВт | Номинальная частота вращения, об/мин | кпд,* | COS ф | 1п/1н | Мп/Мн | Мmах/Мн | 1н, А | Масса, кг |
| Купить АИР56А2 | 0,18 | 2840 | 68,0 | 0,78 | 5,0 | 2,2 | 2,2 | 0,52 | 3,4 |
| Купить АИР56В2 | 0,25 | 2840 | 68,0 | 0,698 | 5,0 | 2,2 | 2,2 | 0,52 | 3,9 |
| Купить АИР56А4 | 0,12 | 1390 | 63,0 | 0,66 | 5,0 | 2,1 | 2,2 | 0,44 | 3,4 |
| Купить АИР56В4 | 0,18 | 1390 | 64,0 | 0,68 | 5,0 | 2,1 | 2,2 | 0,65 | 3,9 |
| Купить АИР63А2 | 0,37 | 2840 | 72,0 | 0,86 | 5,0 | 2,2 | 2,2 | 0,91 | 4,7 |
| Купить АИР63В2 | 0,55 | 2840 | 75,0 | 0,85 | 5,0 | 2,2 | 2,3 | 1,31 | 5,5 |
| Купить АИР63А4 | 0,25 | 1390 | 68,0 | 0,67 | 5,0 | 2,1 | 2,2 | 0,83 | 4,7 |
| Купить АИР63В4 | 0,37 | 1390 | 68,0 | 0,7 | 5,0 | 2,1 | 2,2 | 1,18 | 5,6 |
| Купить АИР63А6 | 0,18 | 880 | 56,0 | 0,62 | 4,0 | 1,9 | 2 | 0,79 | 4,6 |
| Купить АИР63В6 | 0,25 | 880 | 59,0 | 0,62 | 4,0 | 1,9 | 2 | 1,04 | 5,4 |
| Купить АИР71А2 | 0,75 | 2840 | 75,0 | 0,83 | 6,1 | 2,2 | 2,3 | 1,77 | 8,7 |
| Купить АИР71В2 | 1,1 | 2840 | 76,2 | 0,84 | 6,9 | 2,2 | 2,3 | 2,6 | 10,5 |
| Купить АИР71А4 | 0,55 | 1390 | 71,0 | 0,75 | 5,2 | 2,4 | 2,3 | 1,57 | 8,4 |
| Купить АИР71В4 | 0,75 | 1390 | 73,0 | 0,76 | 6,0 | 2,3 | 2,3 | 2,05 | 10 |
| Купить АИР71А6 | 0,37 | 880 | 62,0 | 0,70 | 4,7 | 1,9 | 2,0 | 1,3 | 8,4 |
| Купить АИР71В6 | 0,55 | 880 | 65,0 | 0,72 | 4,7 | 1,9 | 2,1 | 1,8 | 10 |
| Купить АИР71А8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| Купить АИР71В8 | 0,25 | 645 | 54,0 | 0,61 | 4,7 | 1,8 | 1,9 | 1,1 | 9 |
| Купить АИР80А2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| Купить АИР80А2ЖУ2 | 1,5 | 2850 | 78,5 | 0,84 | 7,0 | 2,2 | 2,3 | 3,46 | 13 |
| Купить АИР80В2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| Купить АИР80В2ЖУ2 | 2,2 | 2855 | 81,0 | 0,85 | 7,0 | 2,2 | 2,3 | 4,85 | 15 |
| Купить АИР80А4 | 1,1 | 1390 | 76,2 | 0,77 | 6,0 | 2,3 | 2,3 | 2,85 | 14 |
| Купить АИР80В4 | 1,5 | 1400 | 78,5 | 0,78 | 6,0 | 2,3 | 2,3 | 3,72 | 16 |
| Купить АИР80А6 | 0,75 | 905 | 69,0 | 0,72 | 5,3 | 2,0 | 2,1 | 2,3 | 14 |
| Купить АИР80В6 | 1,1 | 905 | 72,0 | 0,73 | 5,5 | 2,0 | 2,1 | 3,2 | 16 |
| Купить АИР80А8 | 0,37 | 675 | 62,0 | 0,61 | 4,0 | 1,8 | 1,9 | 1,49 | 15 |
| Купить АИР80В8 | 0,55 | 680 | 63,0 | 0,61 | 4,0 | 1,8 | 2,0 | 2,17 | 18 |
| Купить АИР90L2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| Купить АИР90L2ЖУ2 | 3,0 | 2860 | 82,6 | 0,87 | 7,5 | 2,2 | 2,3 | 6,34 | 17 |
| Купить АИР90L4 | 2,2 | 1410 | 80,0 | 0,81 | 7,0 | 2,3 | 2,3 | 5,1 | 17 |
| Купить АИР90L6 | 1,5 | 920 | 76,0 | 0,75 | 5,5 | 2,0 | 2,1 | 4,0 | 18 |
| Купить АИР90LA8 | 0,75 | 680 | 70,0 | 0,67 | 4,0 | 1,8 | 2,0 | 2,43 | 23 |
| Купить АИР90LB8 | 1,1 | 680 | 72,0 | 0,69 | 5,0 | 1,8 | 2,0 | 3,36 | 28 |
| Купить АИР100S2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| Купить АИР100S2ЖУ2 | 4,0 | 2880 | 84,2 | 0,88 | 7,5 | 2,2 | 2,3 | 8,2 | 20,5 |
| Купить АИР100L2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| Купить АИР100L2ЖУ2 | 5,5 | 2900 | 85,7 | 0,88 | 7,5 | 2,2 | 2,3 | 11,1 | 28 |
| Купить АИР100S4 | 3,0 | 1410 | 82,6 | 0,82 | 7,0 | 2,3 | 2,3 | 6,8 | 21 |
| Купить АИР100L4 | 4,0 | 1435 | 84,2 | 0,82 | 7,0 | 2,3 | 2,3 | 8,8 | 37 |
| Купить АИР100L6 | 2,2 | 935 | 79,0 | 0,76 | 6,5 | 2,0 | 2,1 | 5,6 | 33,5 |
| Купить АИР100L8 | 1,5 | 690 | 74,0 | 0,70 | 5,0 | 1,8 | 2,0 | 4,4 | 33,5 |
| Купить АИР112M2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| Купить АИР112М2ЖУ2 | 7,5 | 2895 | 87,0 | 0,88 | 7,5 | 2,2 | 2,3 | 14,9 | 49 |
| Купить АИР112М4 | 5,5 | 1440 | 85,7 | 0,83 | 7,0 | 2,3 | 2,3 | 11,7 | 45 |
| Купить АИР112MA6 | 3,0 | 960 | 81,0 | 0,73 | 6,5 | 2,1 | 2,1 | 7,4 | 41 |
| Купить АИР112MB6 | 4,0 | 860 | 82,0 | 0,76 | 6,5 | 2,1 | 2,1 | 9,75 | 50 |
| Купить АИР112MA8 | 2,2 | 710 | 79,0 | 0,71 | 6,0 | 1,8 | 2,0 | 6,0 | 46 |
| Купить АИР112MB8 | 3,0 | 710 | 80,0 | 0,73 | 6,0 | 1,8 | 2,0 | 7,8 | 53 |
| Купить АИР132M2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| Купить АИР132М2ЖУ2 | 11 | 2900 | 88,4 | 0,89 | 7,5 | 2,2 | 2,3 | 21,2 | 54 |
| Купить АИР132S4 | 7,5 | 1460 | 87,0 | 0,84 | 7,0 | 2,3 | 2,3 | 15,6 | 52 |
| Купить АИР132M4 | 11 | 1450 | 88,4 | 0,84 | 7,0 | 2,2 | 2,3 | 22,5 | 60 |
| Купить АИР132S6 | 5,5 | 960 | 84,0 | 0,77 | 6,5 | 2,1 | 2,1 | 12,9 | 56 |
| Купить АИР132M6 | 7,5 | 970 | 86,0 | 0,77 | 6,5 | 2,0 | 2,1 | 17,2 | 61 |
| Купить АИР132S8 | 4,0 | 720 | 81,0 | 0,73 | 6,0 | 1,9 | 2,0 | 10,3 | 70 |
| Купить АИР132M8 | 5,5 | 720 | 83,0 | 0,74 | 6,0 | 1,9 | 2,0 | 13,6 | 86 |
| Купить АИР160S2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| Купить АИР160S2ЖУ2 | 15 | 2930 | 89,4 | 0,89 | 7,5 | 2,2 | 2,3 | 28,6 | 116 |
| Купить АИР160M2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| Купить АИР160М2ЖУ2 | 18,5 | 2930 | 90,0 | 0,90 | 7,5 | 2,0 | 2,3 | 34,7 | 130 |
| Купить АИР160S4 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| Купить АИР160S4ЖУ2 | 15 | 1460 | 89,4 | 0,85 | 7,5 | 2,2 | 2,3 | 30,0 | 125 |
| Купить АИР160M4 | 18,5 | 1470 | 90,0 | 0,86 | 7,5 | 2,2 | 2,3 | 36,3 | 142 |
| Купить АИР160S6 | 11 | 970 | 87,5 | 0,78 | 6,5 | 2,0 | 2,1 | 24,5 | 125 |
| Купить АИР160M6 | 15 | 970 | 89,0 | 0,81 | 7,0 | 2,0 | 2,1 | 31,6 | 155 |
| Купить АИР160S8 | 7,5 | 720 | 85,5 | 0,75 | 6,0 | 1,9 | 2,0 | 17,8 | 125 |
| Купить АИР160M8 | 11 | 730 | 87,5 | 0,75 | 6,5 | 2,0 | 2,0 | 25,5 | 150 |
| Купить АИР180S2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| Купить АИР180S2ЖУ2 | 22 | 2940 | 90,5 | 0,90 | 7,5 | 2,0 | 2,3 | 41,0 | 150 |
| Купить АИР180M2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| Купить АИР180М2ЖУ2 | 30 | 2950 | 91,4 | 0,90 | 7,5 | 2,0 | 2,3 | 55,4 | 170 |
| Купить АИР180S4 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| Купить АИР180S4ЖУ2 | 22 | 1470 | 90,5 | 0,86 | 7,5 | 2,2 | 2,3 | 43,2 | 160 |
| Купить АИР180M4 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| Купить АИР180М4ЖУ2 | 30 | 1470 | 91,4 | 0,86 | 7,2 | 2,2 | 2,3 | 57,6 | 190 |
| Купить АИР180M6 | 18,5 | 980 | 90,0 | 0,81 | 7,0 | 2,1 | 2,1 | 38,6 | 160 |
| Купить АИР180M8 | 15 | 730 | 88,0 | 0,76 | 6,6 | 2,0 | 2,0 | 34,1 | 172 |
| Купить АИР200M2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| Купить АИР200М2ЖУ2 | 37 | 2950 | 92,0 | 0,88 | 7,5 | 2,0 | 2,3 | 67,9 | 230 |
| Купить АИР200L2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| Купить АИР200L2ЖУ2 | 45 | 2960 | 92,5 | 0,90 | 7,5 | 2,0 | 2,3 | 82,1 | 255 |
| Купить АИР200M4 | 37 | 1475 | 92,0 | 0,87 | 7,2 | 2,2 | 2,3 | 70,2 | 230 |
| Купить АИР200L4 | 45 | 1475 | 92,5 | 0,87 | 7,2 | 2,2 | 2,3 | 84,9 | 260 |
| Купить АИР200M6 | 22 | 980 | 90,0 | 0,83 | 7,0 | 2,0 | 2,1 | 44,7 | 195 |
| Купить АИР200L6 | 30 | 980 | 91,5 | 0,84 | 7,0 | 2,0 | 2,1 | 59,3 | 225 |
| Купить АИР200M8 | 18,5 | 730 | 90,0 | 0,76 | 6,6 | 1,9 | 2,0 | 41,1 | 210 |
| Купить АИР200L8 | 22 | 730 | 90,5 | 0,78 | 6,6 | 1,9 | 2,0 | 48,9 | 225 |
| Купить АИР225M2 | 55 | 2970 | 93,0 | 0,90 | 7,5 | 2,0 | 2,3 | 100 | 320 |
| Купить АИР225M4 | 55 | 1480 | 93,0 | 0,87 | 7,2 | 2,2 | 2,3 | 103 | 325 |
| Купить АИР225M6 | 37 | 980 | 92,0 | 0,86 | 7,0 | 2,1 | 2,1 | 71,0 | 360 |
| Купить АИР225M8 | 30 | 735 | 91,0 | 0,79 | 6,5 | 1,9 | 2,0 | 63 | 360 |
| Купить АИР250S2 | 75 | 2975 | 93,6 | 0,90 | 7,0 | 2,0 | 2,3 | 135 | 450 |
| Купить АИР250M2 | 90 | 2975 | 93,9 | 0,91 | 7,1 | 2,0 | 2,3 | 160 | 530 |
| Купить АИР250S4 | 75 | 1480 | 93,6 | 0,88 | 6,8 | 2,2 | 2,3 | 138,3 | 450 |
| Купить АИР250M4 | 90 | 1480 | 93,9 | 0,88 | 6,8 | 2,2 | 2,3 | 165,5 | 495 |
| Купить АИР250S6 | 45 | 980 | 92,5 | 0,86 | 7,0 | 2,1 | 2,0 | 86,0 | 465 |
| Купить АИР250M6 | 55 | 980 | 92,8 | 0,86 | 7,0 | 2,1 | 2,0 | 104 | 520 |
| Купить АИР250S8 | 37 | 740 | 91,5 | 0,79 | 6,6 | 1,9 | 2,0 | 78 | 465 |
| Купить АИР250M8 | 45 | 740 | 92,0 | 0,79 | 6,6 | 1,9 | 2,0 | 94 | 520 |
| Купить АИР280S2 | 110 | 2975 | 94,0 | 0,91 | 7,1 | 1,8 | 2,2 | 195 | 650 |
| Купить АИР280M2 | 132 | 2975 | 94,5 | 0,91 | 7,1 | 1,8 | 2,2 | 233 | 700 |
| Купить АИР280S4 | 110 | 1480 | 94,5 | 0,88 | 6,9 | 2,1 | 2,2 | 201 | 650 |
| Купить АИР280M4 | 132 | 1480 | 94,8 | 0,88 | 6,9 | 2,1 | 2,2 | 240 | 700 |
| Купить АИР280S6 | 75 | 985 | 93,5 | 0,86 | 6,7 | 2,0 | 2,0 | 142 | 690 |
| Купить АИР280M6 | 90 | 985 | 93,8 | 0,86 | 6,7 | 2,0 | 2,0 | 169 | 800 |
| Купить АИР280S8 | 55 | 740 | 92,8 | 0,81 | 6,6 | 1,8 | 2,0 | 111 | 690 |
| Купить АИР280M8 | 75 | 740 | 93,5 | 0,81 | 6,2 | 1,8 | 2,0 | 150 | 800 |
| Купить АИР315S2 | 160 | 2975 | 94,6 | 0,92 | 7,1 | 1,8 | 2,2 | 279 | 1170 |
| Купить АИР315M2 | 200 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| Купить АИР315МВ2 | 250 | 2975 | 94,8 | 0,92 | 7,1 | 1,8 | 2,2 | 248 | 1460 |
| Купить АИР315S4 | 160 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 288 | 1000 |
| Купить АИР315M4 | 200 | 1480 | 94,9 | 0,89 | 6,9 | 2,1 | 2,2 | 360 | 1200 |
| Купить АИР315S6 | 110 | 985 | 94,0 | 0,86 | 6,7 | 2,0 | 2,0 | 207 | 880 |
| Купить АИР315М(А)6 | 132 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 245 | 1050 |
| Купить АИР315MВ6 | 160 | 985 | 94,2 | 0,87 | 6,7 | 2,0 | 2,0 | 300 | 1200 |
| Купить АИР315S8 | 90 | 740 | 93,8 | 0,82 | 6,4 | 1,8 | 2,0 | 178 | 880 |
| Купить АИР315М(А)8 | 110 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 217 | 1050 |
| Купить АИР315MВ8 | 132 | 740 | 94,0 | 0,82 | 6,4 | 1,8 | 2,0 | 260 | 1200 |
| Купить АИР355S2 | 250 | 2980 | 95,5 | 0,92 | 6,5 | 1. 6 6 | 2,3 | 432,3 | 1700 |
| Купить АИР355M2 | 315 | 2980 | 95,6 | 0,92 | 7,1 | 1,6 | 2,2 | 544 | 1790 |
| Купить АИР355S4 | 250 | 1490 | 95,6 | 0,90 | 6,2 | 1,9 | 2,9 | 441 | 1700 |
| Купить АИР355M4 | 315 | 1480 | 95,6 | 0,90 | 6,9 | 2,1 | 2,2 | 556 | 1860 |
| Купить АИР355MА6 | 200 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 292 | 1550 |
| Купить АИР355S6 | 160 | 990 | 95,1 | 0,88 | 6,3 | 1,6 | 2,8 | 291 | 1550 |
| Купить АИР355МВ6 | 250 | 990 | 94,9 | 0,88 | 6,7 | 1,9 | 2,0 | 454,8 | 1934 |
| Купить АИР355L6 | 315 | 990 | 94,5 | 0,88 | 6,7 | 1,9 | 2,0 | 457 | 1700 |
| Купить АИР355S8 | 132 | 740 | 94,3 | 0,82 | 6,4 | 1,9 | 2,7 | 259,4 | 1800 |
| Купить АИР355MА8 | 160 | 740 | 93,7 | 0,82 | 6,4 | 1,8 | 2,0 | 261 | 2000 |
| Купить АИР355MВ8 | 200 | 740 | 94,2 | 0,82 | 6,4 | 1,8 | 2,0 | 315 | 2150 |
| Купить АИР355L8 | 132 | 740 | 94,5 | 0,82 | 6,4 | 1,8 | 2,0 | 387 | 2250 |
Выбор электродвигателя для компрессора | Техпривод
Компрессоры широко применяются в быту и промышленности для сжатия воздуха и других газов с целью обеспечения работы пневматического инструмента и иного оборудования. Роль привода компрессорной установки чаще всего выполняет электродвигатель. При проектировании важно правильно подобрать двигатель по ряду критериев. Ниже мы расскажем, как это сделать.
Роль привода компрессорной установки чаще всего выполняет электродвигатель. При проектировании важно правильно подобрать двигатель по ряду критериев. Ниже мы расскажем, как это сделать.
Синхронный или асинхронный?
Как показывает опыт, для использования в составе компрессорных установок наилучшим образом подходят синхронные электродвигатели. Этому есть несколько причин:
- при одинаковых габаритных размерах синхронные двигатели мощнее асинхронных;
- при увеличении нагрузки на вал обороты синхронного привода не падают, что позволяет поддерживать высокую производительность компрессора;
- КПД синхронных электродвигателей на несколько процентов выше, чем асинхронных, что объясняется использованием постоянных магнитов и наличием увеличенного воздушного зазора;
- возможность работы с коэффициентом мощности вплоть до cosφ=1;
- при аварийном падении напряжения двигатель сохраняет высокую перегрузочную способность и продолжает надежно работать;
- при эксплуатации в режиме перевозбуждения синхронные электродвигатели отдают в электросеть реактивную мощность, что сводит к минимуму потери и падения напряжения в ней.
Однако, несмотря на все эти достоинства, синхронные двигатели применяются сравнительно редко, поскольку имеют целый ряд существенных недостатков:
- сложная конструкция, снижающая надежность;
- сложная схема запуска, увеличивающая стоимость компрессора и затраты на его обслуживание;
- сложная система управления оборотами, не позволяющая в полной мере применять плавный пуск и регулировку давления компрессора путем изменения скорости;
- сравнительно высокая стоимость.
Перечисленные недостатки синхронных агрегаты перевешивают их преимущества, поэтому в компрессорах используются надежные, дешевые асинхронные двигатели. О них и пойдет речь ниже.
Характеристики электросети
При выборе двигателя необходимо принимать во внимание особенности электросети, в которую он будет включаться. В одних случаях потребуются однофазные модели, рассчитанные на переменный ток напряжением 220 В, в других — трехфазные электродвигатели, работающие от сети 380 В. В настоящее время большинство промышленных компрессоров имеют питание 380 В.
В настоящее время большинство промышленных компрессоров имеют питание 380 В.
Режим работы
Чаще всего компрессоры работают в продолжительном режиме работы (S1 по ГОСТ). С учётом этого оптимальным выбором становятся нереверсивные электродвигатели, рассчитанные на редкие запуски. Двигатели с режимом работы S1 способны работать продолжительное время без остановки при должном охлаждении.
Пусковой статический момент
Еще один важный фактор, который нужно учитывать — особенности запуска компрессора. Его пусковой статический момент может значительно превышать номинальный, поэтому необходимо располагать точными данными и подбирать электродвигатель, способный привести компрессор в действие с учетом пускового момента.
Указанное обстоятельство имеет значение не только при комплектации компрессора новым двигателем, но и при замене вышедшего из строя привода, особенно при установке однофазной модели вместо трёхфазной. Первая имеет приблизительно в три раза меньший пусковой момент. Таким образом, есть вероятность, что компрессор, который успешно функционировал с трёхфазным двигателем, с однофазным не запустится.
Таким образом, есть вероятность, что компрессор, который успешно функционировал с трёхфазным двигателем, с однофазным не запустится.
Скорость и охлаждение
Регулировка скорости двигателя в компрессоре имеет смысл в двух случаях:
- Плавный пуск. Обычно реализуется схемой «звезда-треугольник».
- Плавный пуск и изменение скорости при работе с целью регулировки и поддержания заданного давления на выходе компрессора. Реализуется применением преобразователя частоты.
Несмотря на то, что в компрессорах электродвигатель работает со скоростью не менее 50% от номинала, при понижении оборотов двигателя с крыльчаткой существенно ухудшается воздушное охлаждение. Поэтому в случае с регулировкой скорости необходимо выбирать агрегат с принудительным охлаждением, в котором есть встроенный вентилятор с отдельным питанием.
Геометрические параметры
Подбирайте двигатель так, чтобы его габариты, диаметр вала и другие геометрические параметры соответствовали тем, которые имеет компрессорная установка. Тогда механические соединения двигателя и компрессора не будут представлять особых сложностей.
Тогда механические соединения двигателя и компрессора не будут представлять особых сложностей.
Выбор мощности
Как было сказано выше, компрессор — устройство с постоянной нагрузкой и продолжительным режимом работы. Как и для прочих машин с аналогичными характеристиками, требуемая мощность электродвигателя для компрессора определяется по мощности на валу.
Если двигатель будет соединяться с компрессором ременной или шестерёнчатой передачей, необходимо закладывать в расчёты КПД последней. Для этого используется следующая формула:
P = kЗ x (Q x A x 10-3) / (ηК х ηП)
где:
P — требуемая мощность электродвигателя в кВт;
kЗ — коэффициент запаса, варьирующийся, как правило, от 1,05 до 1,15. Он необходим, чтобы включить в расчёты факторы, не поддающиеся вычислениям;
Q — подача (производительность) компрессора, выраженная в м3/с;
А — работа адиабатического и изотермического сжатия атмосферного воздуха объёмом 1 м3 до требуемого давления;
ηК — индикаторный КПД компрессора. В этом значении отражается потеря мощности, возникающая при реальном сжатии воздуха. Как правило, оно варьируется от 0,6 до 0,8;
В этом значении отражается потеря мощности, возникающая при реальном сжатии воздуха. Как правило, оно варьируется от 0,6 до 0,8;
ηП — КПД передачи, соединяющей электродвигатель и компрессор. Как правило, его значение варьируется от 0,9 до 0,95.
Запас мощности
В некоторых случаях компрессор работает с производительностью, превышающей расчётную. Это, как правило, бывает связано с особенностями градации моделей и ограниченной возможностью выбора. Если предполагается эксплуатация устройства в таких условиях, его нужно комплектовать электродвигателем повышенной мощности. Это увеличит ресурс двигателя и создаст запас по мощности для компрессора.
Другие полезные материалы:
Мотор-редуктор для буровой установки
Сервопривод или шаговый двигатель?
Принципы программирования ПЛК
Способы узнать мощность электродвигателя, когда нет бирки
Определить характеристики трехфазного электродвигателя, когда табличка утрачена, можно разнообразными способами: например, потребуется узнать мощность и количество оборотов вала. Удостоверьтесь, что таблички нет на месте, или отсутствует техническая документация (все это должно прилагаться заводом-производителем вместе с оборудованием), после чего переходите к самостоятельному определению рабочих характеристик. И тут сразу возникает вопрос: как узнать мощность электродвигателя, если нет таблички.
Удостоверьтесь, что таблички нет на месте, или отсутствует техническая документация (все это должно прилагаться заводом-производителем вместе с оборудованием), после чего переходите к самостоятельному определению рабочих характеристик. И тут сразу возникает вопрос: как узнать мощность электродвигателя, если нет таблички.
Определение мощности счетчиком, когда табличка утрачена
Подойдет как бытовой счетчик, так и портативный. Чтобы показания прибора были четкими, потребуется отключение всех устройств в доме, питающихся от сети, а также всех имеющихся источников света. Даже маломощная включенная лампа исказит показания.
Важно! Убедитесь, что счетчик не крутится, или его лампочка не мигает.
В индукционных моделях показания считываются в киловаттах в час – этот вариант проще. Зафиксируйте цифры на счетчике до того, как включите мотор, и пусть потом поработает минут десять (засеките время). Посмотрите, какие показания получились, и сравните их с предыдущими. Полученная разница умножается на 6 – это и будет мощность электродвигателя в киловаттах.
Полученная разница умножается на 6 – это и будет мощность электродвигателя в киловаттах.
Проверить электродвигатель с малой мощностью чуть сложнее. Нужно выяснить, сколько оборотов происходит за 1 кВт/ч на счетчике, например, 1600. Запускаем 3-фазный двигатель и видим, что индикатор прибора крутится со скоростью 20 оборотов в минуту. Умножаем 20 на 60 = 1200. 1600 делим на 1200 – получаем мощность. Результат получится с погрешностью, но точность зависит от длительности производимого замера.
Как узнать мощность электродвигателя, если нет таблички, по таблице
Не имея таблички, мощность электродвигателя узнается благодаря разнообразным табличным данным. Потребуется определить:
- Какой диаметр имеет вал.
- С какой частотой он вращается, количество полюсов.
- Какими крепежными размерами обладает.
- Высоту до центральной оси вала и расстояние.
- Длину трехфазного двигателя.
- Диаметр фланца (когда говорится о фланцевом электродвигателе).

Совет: Собрав все данные, сверьтесь с таблицами. Информация и видео в интернете есть даже по старым моторам.
Измерьте габариты вала и крепежных отверстий – сопоставьте с таблицей:
Измерив напряжение тока, узнаем, какой мощностью обладает мотор
Определение мощности электродвигателя, если он трехфазный, не имея таблички, возможно и с помощью тока. Двигатель необходимо подключить к электросети, чтобы узнать напряжение. Воспользовавшись амперметром или мультиметром, сначала следует измерить ток в одной обмотке статора, а потом в другой. Данные суммируем, и полученное число потребуется умножить на фиксированное напряжение. Узнав результат – определите мощность 3-фазного мотора даже без таблички.
Найти искомое число предлагается по формуле:
Важно! Определение мощности возможно с помощью мультиметра, совмещающего в себе и амперметр, и вольтметр, и омметр.
Не потребуется табличка, если установить параметры работы двигателя. Известно, что одной из важных характеристик считается величина потребляемого тока. Расчет этого параметра ведется с учетом количества фаз в моторе, напряжения, сопротивления. Для трехфазного берется напряжение в 380 В. И величина тока, которую потребляет электродвигатель, зависит от вида запуска:
Известно, что одной из важных характеристик считается величина потребляемого тока. Расчет этого параметра ведется с учетом количества фаз в моторе, напряжения, сопротивления. Для трехфазного берется напряжение в 380 В. И величина тока, которую потребляет электродвигатель, зависит от вида запуска:
Несмотря на то, что формула показывает точные данные, иногда требуются дополнения. В обязательном порядке учитывается тот факт, что полученный результат отражает величину тока, когда используется номинальная нагрузка. Для точных измерений потребуется мультиметр. Электродвигатель на холостом ходу потребляет меньше тока:
Также, когда нет таблички, мощность рассчитывается по сопротивлению обмоток. Для начала необходимо узнать сопротивление, которое концентрируется между выводами. Полученное число делится на 2, и станет известно сопротивление обмотки. Для определения мощности одной обмотки применяется формула: P=(220V*220V)/R. Результат вычисления умножается на 3 (поскольку двигатель 3-фазный).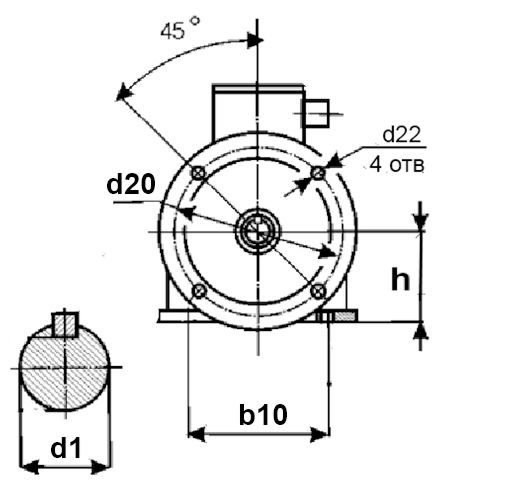 Получаем искомую мощность мотора.
Получаем искомую мощность мотора.
Предложенный вариант используется для определения сопротивления при соединении звездой. Если использовать треугольник, то схема действий немного иная. Узнав величину сопротивления для каждой обмотки в начале и конце, воспользуйтесь формулой, предложенной выше, только результат нужно умножить не на 3, а на 6. Для измерений будет удобно воспользоваться мультиметром. Благодаря несложным расчетами неважно, есть ли табличка на моторе, к тому же в сети много обучающих видео по этой теме.
Вычисление мощности с учетом оборотов вала
Когда табличка на корпусе мотора нечитаема или утеряна, определяем рабочие характеристики 3-фазного двигателя, учитывая оборот вала. Достаточно отсоединить задний кожух, чтобы открылась обмотка статора. Так это будет выглядеть схематически:
Узнать количество оборотов трехфазного мотора возможно благодаря полюсам, используя мультиметр, подключившись к обмотке статора. Вал начнет вращаться, а индикатор мультиметра – показывать отклонения, происходящие за один оборот. При двух полюсах – три тысячи оборотов в минуту, четырех – полторы тысячи, шести – две тысячи, восьми – семьсот пятьдесят.
Если бы была табличка, то последняя цифра на маркировке соответствовала бы количеству полюсов. В обратном случае берем обмотку, раскрываем верхнюю часть. Смотрим, как размещаются секции обмотки. Считаем общее количество пазов, делим на 12 – получаем полюс.
Определяем характеристики мотора, смотря на габариты
Без таблички на корпусе установить рабочие параметры мотора, если он трехфазный, можно по габаритам устройства. Для этого узнайте частоту сети (F), размер диаметра сердечника (D), синхронную частоту валового вращения (N). Достаточно измерить внутреннюю часть статора, чтобы установить, каким диаметром наделен сердечник. Для измерения используются сантиметры.
Учитывая полученные цифры, измерив габарит устройства, посчитайте полюсное деление. Здесь D умножается на N и на число Пи (А). Затем 120 умножается на F – получится B. Потом А делится на В. Для измерения F и N применяется мультиметр. Произвести расчеты нетрудно, зная габарит 3-фазного мотора, без таблички.
Трехфазный электродвигатель и крутящий момент
Крутящий момент определяется через силу, выдаваемую 3-фазным двигателем в попытке преодолеть сопротивление, возникающее при движении, которую умножают на плечо ее приложения. Мкр = VHxPE:0,12566 – формула позволяет определить рабочие параметры мотора. Здесь: VH – объем ДВС, а PE – давление в камере сгорания.
Возникли сложности с определением крутящего момента – воспользуйтесь формулой: Ne=Vh*pe*n:120. Результат высчитывается в киловаттах. Здесь: Vh – объем ДВС, n – частота вращения, pe – давление.
Зачем разбираться в устройстве оборудования, имея 3-фазный мотор: знание рабочих параметров двигателя позволит правильно эксплуатировать устройство, подбирать соответствующие детали, а видео в сети наглядно покажут:
- Как узнать мощность электродвигателя, если нет таблички.
- Как высчитать искомые цифры, используя формулы и т.д.
Когда табличка на корпусе – задача упрощается. Но если таблички нет, не стоит отчаиваться, доступно множество вариантов для определения рабочих параметров двигателя.
Загрузка…Как определить скорость вращения электродвигателя
Главное меню:
- Основы
- Электромашины
- Оборудование
- Нормы
- Подстанция
- Комплектные трансформаторные подстанции
- Оборудование подстанций
- Вакуумные выключатели
- ВВ/TEL
- ВР
- ВРО
- ВР1
- ВР1 для КСО
- ВРС
- 3АН5
- ВГГ-10
- Камеры КСО
- Ограничители перенапряжений 6(10) кВ
- Масляный выключатель
- ВПМ-10
- Техническое описание ВПМ
- ВМП-10
- ВМГ-133
- Выключатель нагрузки автогазовый ВНА
- Описание выключателя
- Изображение выключателя
- Ремонт электрооборудования
- Повышение надежности МВ, приводов МВ
- Установки компенсации реактивной мощности
- Общие сведения об УКРМ
- УКРМ 0,4 кВ
- УКРМ 6(10) кВ
- Выбор места расположения питающих подстанций
- Электроснабжение
- Освещение
- Воздушная линия
Основы > Задачи и ответы > Сборник задач — электрические машины
Асинхронные электродвигатели (страница 2)
1.
Определить угловую скорость вращении ротора асинхронного электродвигателя, если обмотка статора четырехполюсная, частота напряжения сети, к которой присоединен электродвигатель, 50 Гц и скольжение ротора равно 3,5%.Решение: Частота токов, проходящих в обмотках статора, равна частоте напряжения сети: Кроме того, известно, что обмотка статора четырехполюсная, т. е. число пар полюсов р = 2.
Скорость вращения магнитного потока, вызываемого трехфазной системой токов, проходящих в обмотках статора, зависит от частоты этих токов
и числа пар полюсов обмотки р, так как , откуда число оборотов в минуту вращающегося синхронно магнитного потока Угловая скорость вращения Вращение ротора асинхронного электродвигателя возможно лишь при наличии отставания ротора от вращающегося магнитного потока. Величина, характеризующая это отставание, называется скольжением: — скорость вращения магнитного потока; — скорость вращения ротора.Подставив числовые значения, получим Угловая скорость вращения ротора2. На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?Решение: В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости ) является скорость .Следовательно, скольжение ротора Число пар полюсов обмотки статора
В момент пуска ротор неподвижен
. Поэтому скольжение при пуске Такое значение имеет скольжение ротора в момент пуска любого асинхронного электродвигателя.
Таблица 13
| р пар полюсов | 1 | 2 | 3 | 4 | 5 |
| n, об/мин | 3000 | 1500 | 1000 | 750 | 600 |
3.
В разрыв провода линии, соединяющей контактные кольца ротора асинхронного электродвигателя с трехфазным реостатом, введен магнитоэлектрический амперметр, шкала которого имеет нулевое значение посередине (рис. 80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.Определить скорость вращения ротора в течение указанного промежутка времени, если обмотка статора шестиполюсная и частота напряжения сети 50 Гц.
Решение:
Полное колебание указательной стрелки соответствует полному периоду тока в обмотке ротора. Если 60 полных колебаний (периодов) произошло за полминуты, то число полных колебаний (периодов) в секунду равно двум. Следовательно, Магнитный поток в асинхронном электродвигателе вращается относительно ротора со скоростью, равной разности скоростей: причем частота тока в роторе Подставив числовые значения, получим
При шестиполюсной обмотке статора и частоте токов в цепи статора
скорость вращения магнитного потока
Подставим в выражение для
откуда скорость вращения ротора4. Когда трехфазный асинхронный двигатель с фазным ротором присоединили к сети с линейным напряжением 220 В, напряжение между контактными кольцами при разомкнутой обмотке ротора составило 90 В.Определить коэффициент трансформации, рассматривая этот электродвигатель как трансформатор в режиме холостого хода, если обмотки статора и ротора соединены звездой.Решение: Фазное напряжение на обмотке статора при схеме соединения звездой в раз меньше линейного напряжения. Следовательно, Фазное напряжение на обмотке ротора Коэффициент трансформации фазных напряжений5. Асинхронный электродвигатель с короткозамкнутым ротором характеризуется отношением вращающих моментов соответственно при пуске и при номинальном режиме .Можно ли осуществить пуск двигателя в случае полной его нагрузки на валу и понижения напряжения в сети на 5 и 10%? К сети присоединен статор.Решение: Вращающий момент асинхронного двигателя прямо пропорционален квадрату напряжения в сети:
Следовательно, если напряжение в сети понизится на 5% и составит
Так как пусковой момент при номинальном напряжении , то при понижении напряжения в сети на 5% пусковой момент Таким образом, пуск при этих условиях позволит электродвигателю развить вращающий момент больше номинального.
Если напряжение в сети понизится на 10% и составит
Пусковой момент при указанном понижении напряжения долю, которую составляет пусковой вращающий момент от вращающего момента при номинальном напряжении. Тогда для возможности пуска электродвигателя при номинальной нагрузке должно быть выполнено равенство Поэтому при пуске электродвигателя напряжение сети может составлять от номинального напряжения долю
Таким образом, при заданной кратности пускового момента от номинального
понижение напряжения в сети может происходить на и пуск может быть осуществлен при номинальной нагрузке на валу электродвигателя.
6. Асинхронный электродвигатель с короткозамкнутым ротором типа А51-4 имеет следующие номинальные данные: ; кратность вращающих моментов .
Определить вращающие моменты: номинальный , максимальный и пусковой Решение:
Номинальный вращающий момент можно определить из основного соотношения измерен в и мощность Р — в Вт. При этом Если подставить сюда в качестве Р мощность, измеренную в киловаттах, то число будет в 1000 раз меньше.Таким образом, при тех же единицах измерения вращающего момента получим Подставим величины номинального режима: Используя известные кратности моментов, максимальный вращающий момент пусковой вращающий момент7. Асинхронный электродвигатель развивает номинальную мощность при номинальной скорости вращения ротора , имея перегрузочную способность 2,1.Выразить зависимость между вращающим, моментом и скольжением ротора S электродвигателя.Решение: Номинальный вращающий момент
Перегрузочная способность
l = 2,1 представляет собой отношение максимального вращающего момента к номинальному вращающему моменту Номинальному вращающему моменту соответствует и номинальное скольжение подставлена ближайшая большая (по отношению к ) синхронная скорость вращения магнитного потока статора.Зависимость между вращающим моментом и скольжением ротора s в асинхронном двигателе выражается формулой означает критическое скольжение, а и s соответствуют одному и тому же режиму работы. Если в левую часть подставить , то в качестве s следует подставить . Тогда можно определить критическое скольжение , при котором имеет место момент . В этом случае получается квадратное уравнение, из которого берут большее значение корня.Так как Разделив на 0,238 левую и правую части равенства и сосредоточив все члены в одной стороне, получим Корни полученного квадратного уравнения Далее берется только больший из корней (при положительном знаке перед корнем):
Подставив в формулу, выражающую зависимость между вращающим моментом
и скольжением ротора s, численные значения , получим требуемую зависимость
Смотри полное содержание по представленным решенным задачам на websor.
Как определить число пар полюсов асинхронного двигателя?
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту.
Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор.
По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса.
Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой.
Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково.
Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
FAQ по электродвигателям
Какие электродвигатели применяются чаще всего? Какие способы управления электродвигателями используются? Как прозвонить электродвигатель и определить его сопротивление? Как определить мощность электродвигателя? Как увеличить или уменьшить обороты электродвигателя? Как рассчитать ток и мощность электродвигателя? Как увеличить мощность электродвигателя? Каковы потери мощности при подключении трехфазного двигателя к однофазной сети? Какие исполнения двигателей бывают? Зачем электродвигателю тормоз? Как двигатель обозначается на электрических схемах? Почему греется электродвигатель? Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле.
Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера.
Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.
Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению.
Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение.
Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности.
Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала.
Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев.
Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам.
При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
- Р = I (1,73·U·cosφ·η)
- где: Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике), I – ток двигателя, А, U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
- cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
- Для расчета тока по известной мощности пользуются обратной формулой:
- I = P/(1,73·U·cosφ·η)
- Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.
Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.
12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
- 13. Типичные неисправности электродвигателей
- Выделяют два вида неисправностей электродвигателей: электрические и механические.
- К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы: Выбор электродвигателя Использование тормозных резисторов с преобразователями частоты
Что следует учитывать при выборе асинхронного электродвигателя
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования.
Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора.
Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения.
Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе.
Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель.
При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ.
totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD).
При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы.
Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель. Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В.
Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять.
Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости.
По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ.
CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах.
Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха.
Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель.
Производительность такого устройства не связана с системой управления электропривода.
В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего моментаПри выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели.
Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно.
Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
| Число полюсов, N | Скорость, об/мин | Крутящий момент, л. с. / фут-фунт |
| 2 | 3600 | 1,46 |
| 4 | 1800 | 2,92 |
| 6 | 1200 | 4,38 |
| 8 | 900 | 5,84 |
| 10 | 720 | 7,29 |
| 12 | 600 | 8,75 |
Примечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Как определить мощность и обороты электродвигателя без бирки?
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
Как определить мощность и потребляемый ток электродвигателя
Все электрические двигатели выпускаются с табличками на корпусе, из которых можно узнать основные характеристики электродвигателя: его марку, потребляемый номинальный рабочий ток и мощность, частоту вращения, тип двигателя, КПД и cos(fi). Так же эти данные указаны в паспорте к устройству.
Из всех параметров наиболее важное значение для подключения имеют: мощность электродвигателя и потребляемый ток, не стоит его путать с пусковым. Именно эти данные позволяют нам определить достаточность мощности для привода, необходимое сечение кабеля для подключения мотора и подобрать подходящие по номиналу для защиты автомат и тепловое реле.
Но бывает, что нет паспорта или таблички и для определения этих величин необходимо будет сделать измерения. Как узнать мощность, рабочий ток и снизить пусковой, Вы узнаете далее из этой статьи.
Как определить мощность электродвигателя
Проще всего посмотреть на табличку и найти величину в киловаттах. Например, на картинке она равна 45 кВт.Учтите, что эта величина на табличке указывает на потребляемую активную мощность из электросети. Полная же мощность будет равна сумме активной и реактивной мощности. Электрические счетчики в доме или гараже считают только расход активной электроэнергии, а учет реактивной энергии ведется только на предприятиях при помощи специальных счетчиков. Чем выше у электродвигателя cos(fi), тем меньше будет составляющая реактивной энергии в полной мощности. Не стоит путать cos(fi) с КПД. Этот показатель показывает сколько электроэнергии переводится в полезную механическую работу, а сколько в бесполезное тепло. Например, КПД равный 90 процентам, говорит о том, что десятая часть потребленной электроэнергии уходит на тепловые потери и трение в подшипниках.
Вы должны иметь ввиду, что в паспорте или на табличке указывается номинальная мощность, которая будет равна этому значению только при условии достижения оптимальной нагрузки на вал. При чем перегружать не стоит вал по целому ряду причин, лучше выбрать по мощнее мотор. На холостом ходу величина тока будет гораздо ниже номинала.
Как же определить номинальную мощность электродвигателя? В интернете Вы найдете много различных формул и расчетов. Для некоторых необходимо помереть размеры статора, для других формул понадобится знать величину тока, КПД и cos(fi). Мой совет не заморачивайтесь со всем этим. Лучше этих расчетов все равно будут практические измерения. И для их проведения ничего не понадобится вообще.
Как определить мощность любого электроприбора в доме или гараже? Конечно с помощью счетчика электроэнергии. Перед началом измерения отключите все электроприборы из розеток, освещение и все то, что подключено от электрощита.
Далее если у Вас электронный счетчик типа Меркурий, все очень просто надо включить мотор под нагрузкой и погонять минут 5. На электронном табло должна высветится величина нагрузки в кВт, подключенная к счетчику в данный момент.
Если же у вас дисковый индукционный счетчик учитывайте, что он учет ведет в киловатт/часах. Запишите перед началом измерений последние показатели, включайте двигатель строго секунда в секунду ровно на 10 минут, затем после остановки отнимите новые показания от предыдущих и умножайте кВт\ч на 6. Полученный результат и будет активной мощностью данного двигателя в Киловаттах, для перевода в Ватты разделите на 1000. Рекомендую прочитать статью: как снимать показания электросчетчика.
Если двигатель маломощный, тогда для более высокой точности можно посчитать обороты диска. Например, за одну минуту он сделал 10 полных оборотов, а на счетчике написано 1200 оборотов= 1 кВт/ч. 10 умножаем на количество минут в часе и получаем 600 оборотов за час. 1200 делим на 600 и получаем 500 Ватт или 0.5 кВт. Чем дольше по времени будете измерять, тем точнее будут данные. Но время всегда должно быть кратно полной минуте. Затем делим 60 на количество минут измерения и умножаем на сосчитанные обороты. После этого величину оборотов, равных одному Киловатт/часу для вашей модели электросчетчика делим на полученный результат и получаем необходимую величину мощности.
Как определить потребляемый ток электродвигателя
Зная мощность, легко можно высчитать величину потребляемого тока. Для 3 фазных двигателей, подключенных по схеме звезда на 380 Вольт, необходимо умножить мощность в киловаттах на 2. Например, при мощности 5 киловатт ток будет равен 10 Ампер. Опять же учитывайте, что такой ток мотор будет брать только под нагрузкой максимально близкой к номиналу. Полунагруженный электродвигатель и тем более на холостом ходу будет потреблять значительно меньший ток.
Для определения тока в однофазных сетях, необходимо мощность разделить на напряжение. Например, при работе двигателя напряжение в месте его подключения равно 230 Вольт. Это важно так, как после включения нагрузки напряжение скорее всего понизится в месте подключения электродвигателя.
Если например, мощность мотора на 220 Вольт по измерениям оказалась равной 1.5 кВт или 1500 Ватт. Делим 1500 на 230 Вольт и получаем, что рабочий ток двигателя приблизительно равен 6.5 Ампер.
Пусковой ток электродвигателя
При запуске любого типа электродвигателя возникает пусковой ток от 2 до 8 кратного значению номинального тока в рабочем режиме электродвигателя. Величина пускового тока зависит от типа двигателя, скорости вращения, схемы подключения, наличие нагрузки на валу и от других параметров.
Пусковой ток возникает, потому что в момент запуска наводится очень сильное магнитное поле в обмотках необходимое, что бы сдвинуть с места и раскрутить ротор. При включении мотора сопротивление обмоток мало, а следовательно по закону Ома, ток вырастает при неизменном напряжении в участке цепи. По мере того как двигатель раскручивается, возникает в обмотках ЭДС или индуктивное сопротивление и ток начинает уменьшаться до номинального значения.
Эти всплески реактивной энергии негативно сказываются на работе других электропотребителей, подключенных к этой же линии электропитания, что служит причиной возникновения особенно губительных для электроники скачков или перепадов напряжения.
Снизить вдвое пусковой ток можно при использовании специально разработанного для этих целей тиристорного блока, а лучше при помощи устройства плавного запуска (УПЗ). УПЗ с меньшим пусковым током и быстрее в полтора раза запускает мотор по сравнению с тиристорным запуском. Устройства плавного запуска подходят как к синхронным, так и к асинхронным двигателям. УПЗ выпускаются предприятиями Украины и России.
Для запуска трехфазного асинхронного двигателя сегодня нередко используются и преобразователя частоты. Широкое их распространение пока сдерживает только цена. Благодаря изменению величин частоты тока и напряжения удается не только сделать плавный запуск, но и регулировать скорость вращения ротора. По другому как только изменением частоты электрического тока, регулировать скорость вращения асинхронного двигателя нет возможности. Но следует знать, что частотный преобразователь создает помехи в электросети, поэтому для подключения электроники и бытовой техники используйте сетевой фильтр.
Использование устройства плавного запуска и частотного преобразователя позволяет не только сохранить стабильность электропитания у Вас и Ваших соседей, подключенных к одной линии электроснабжения, но и продлить срок службы электродвигателей.
Учебное пособие по электродвигателям постоянного тока— Расчеты электродвигателей постоянного тока без сердечника с щетками
Расчет двигателей для бесщеточных двигателей постоянного тока без сердечника
При выборе бесщеточного двигателя постоянного тока без сердечника для приложения или при разработке прототипа с приводом необходимо учитывать несколько основных принципов физики двигателя, которые необходимо учитывать для создания безопасной, хорошо функционирующей и достаточно мощной прецизионной приводной системы. В этом документе мы представили некоторые важные методы, формулы и детали расчетов для определения выходной мощности двигателя без сердечника, кривую скорость-крутящий момент двигателя, графики тока и эффективности, а также теоретические расчеты в холодном состоянии, которые оценивают характеристики двигателя.
Двигатели постоянного токаявляются преобразователями, поскольку они преобразуют электрическую энергию ( P в ) в механическую энергию ( P из ). Частное обоих членов соответствует КПД двигателя. Потери на трение и потери в меди приводят к общей потере мощности ( P потери ) в Джоулях / сек (потери в железе в двигателях постоянного тока без сердечника незначительны). Есть дополнительные потери из-за нагрева, но мы обсудим их ниже:
В физике мощность определяется как скорость выполнения работы.Стандартная метрическая единица измерения мощности — «ватт» Вт. Как рассчитывается мощность? Для линейного движения мощность — это произведение силы и расстояния в единицу времени P = F · (d / t) . Поскольку скорость — это расстояние во времени, уравнение принимает вид P = F · s . В случае вращательного движения аналогичный расчет мощности представляет собой произведение крутящего момента и углового расстояния в единицу времени или просто произведение крутящего момента и угловой скорости.
Где:
P = Мощность, Вт
M = Крутящий момент в Нм
F = Сила, Н
d = Расстояние в м
t = Время в с
ω рад = угловая скорость в рад / с
Символ, используемый для крутящего момента, обычно представляет собой строчную греческую букву «τ» (тау) или иногда просто букву «T» .Однако, когда он называется «Момент силы», его обычно обозначают буквой «М» .
В европейской номенклатуречасто используется строчная буква « n » для обозначения скорости вокруг оси. Обычно « n » выражается в единицах оборотов в минуту или об / мин.
При расчете механической мощности важно учитывать единицы измерения. При вычислении мощности, если « n » (скорость) находится в мин -1 , то вы должны преобразовать это в угловую скорость в единицах рад / с .Это достигается умножением скорости на коэффициент преобразования 2π / 60 . Кроме того, если « M » (крутящий момент) находится в мНм , то мы должны умножить его на 10 -3 (разделить на 1 000), чтобы преобразовать единицы в Нм для целей расчета.
Где:
n = Скорость в мин. -1
M = Крутящий момент в мНм
Предположим, что необходимо определить мощность, которую конкретный двигатель 2668W024CR должен выдавать при холодной работе с крутящим моментом 68 мНм при скорости 7 370 мин. -1 .Произведение крутящего момента, скорости и соответствующего коэффициента преобразования показано ниже.
Расчет начальной требуемой мощности часто используется в качестве предварительного шага при выборе двигателя или мотор-редуктора. Если механическая выходная мощность, необходимая для данного приложения, известна, то можно изучить максимальную или продолжительную номинальную мощность для различных двигателей, чтобы определить, какие двигатели являются возможными кандидатами для использования в данном приложении.
Ниже приведен метод определения параметров двигателя на примере двигателя постоянного тока без сердечника 2668W024CR.Сначала мы объясним более эмпирический подход, а затем проведем теоретический расчет.
Одним из широко используемых методов графического построения характеристик двигателя является использование кривых крутящий момент-скорость. Хотя использование кривых крутящий момент-скорость гораздо более распространено в технической литературе для более крупных машин постоянного тока, чем для небольших устройств без сердечника, этот метод применим в любом случае.
Обычно кривые крутящий момент-скорость генерируются путем построения графиков скорости двигателя, тока двигателя, механической выходной мощности и эффективности в зависимости от крутящего момента двигателя.Следующее обсуждение будет описывать построение набора кривых крутящего момента-скорости для типичного двигателя постоянного тока на основе серии измерений необработанных данных.
2668W024CR имеет номинальное напряжение 24 В. Если у вас есть несколько основных частей лабораторного оборудования, вы можете измерить кривые крутящий момент-скорость для бессердечникового двигателя постоянного тока серии 2668 CR в заданной рабочей точке.
Шаг 1. Измерьте основные параметры
Многие параметры можно получить напрямую с помощью контроллера движения, такого как один из контроллеров движения FAULHABER MC3.Большинство производителей контроллеров предлагают программное обеспечение, такое как FAULHABER Motion Manager, которое включает функцию записи трассировки, которая отображает напряжение, ток, положение, скорость и т. Д. Они также могут предоставить точный снимок работы двигателя с мельчайшими подробностями. Например, семейство контроллеров движения MC3 (MC 5004, MC 5005 и MC 5010) может измерять множество параметров движения. Это, вероятно, самый быстрый метод получения данных для построения кривой крутящего момента — скорости, но это не единственный метод.
Если контроллер с возможностью записи трассировки недоступен, мы также можем использовать некоторое базовое лабораторное оборудование для определения характеристик двигателя в условиях остановки, номинальной нагрузки и холостого хода. Используя источник питания, установленный на 24 В, запустите 2668W024CR без нагрузки и измерьте скорость вращения с помощью бесконтактного тахометра (например, стробоскопа). Кроме того, измерьте ток двигателя в этом состоянии без нагрузки. Токовый пробник идеально подходит для этого измерения, поскольку он не добавляет сопротивления последовательно с работающим двигателем.Используя регулируемую крутящую нагрузку, такую как тормоз для мелких частиц или регулируемый гистерезисный динамометр, нагрузка может быть связана с валом двигателя.
Теперь увеличьте крутящий момент на двигателе точно до точки. где происходит срыв. При остановке измерьте крутящий момент от тормоз и ток двигателя. Ради этого обсуждение, предположим, что муфта не добавляет нагрузки к двигатель и что нагрузка от тормоза не включать неизвестные фрикционные компоненты. Это также полезно в этот момент, чтобы измерить оконечное сопротивление мотор.Измерьте сопротивление, соприкоснувшись с двигателем. клеммы с омметром. Затем раскрутите вал двигателя. и сделайте еще одно измерение. Измерения должны быть очень близки по стоимости. Продолжайте вращать вал и сделайте не менее трех измерений. Это обеспечит что измерения не проводились в точке минимальный контакт на коммутаторе.
Теперь мы измерили:
n 0 = скорость холостого хода
I 0 = ток холостого хода
M H = крутящий момент при остановке
R = оконечное сопротивление
Шаг 2: Постройте график зависимости тока отКрутящий момент и скорость в зависимости от крутящего момента
Вы можете подготовить график с крутящим моментом двигателя по абсциссе (горизонтальная ось), скоростью по левой ординате (вертикальная ось) и током по правой ординате. Масштабируйте оси на основе измерений, которые вы сделали на первом шаге. Проведите прямую линию от левого начала графика (нулевой крутящий момент и нулевой ток) до тока останова на правой ординате (крутящий момент при останове и ток останова). Эта линия представляет собой график зависимости тока двигателя от крутящего момента двигателя.Наклон этой линии представляет собой постоянную тока k I , которая является константой пропорциональности для отношения между током двигателя и крутящим моментом двигателя (в единицах тока на единицу крутящего момента или А / мНм). Обратной величине этого крутизны является постоянная крутящего момента k M (в единицах крутящего момента на единицу тока или мНм / А).
Где:
k I = постоянная тока
k M = постоянная момента
В целях данного обсуждения предполагается, что двигатель не имеет внутреннего трения.На практике момент трения двигателя M R определяется умножением постоянной крутящего момента двигателя k M на измеренный ток холостого хода I 0 . Линия зависимости крутящего момента от скорости и линия зависимости крутящего момента от тока затем начинается не с левой вертикальной оси, а со смещением по горизонтальной оси, равным расчетному моменту трения.
Где:
M R = момент трения
Шаг 3: Постройте сюжет Power vs.Крутящий момент и эффективность в зависимости от крутящего момента
В большинстве случаев можно добавить две дополнительные вертикальные оси для построения графика зависимости мощности и КПД от крутящего момента. Вторая вертикальная ось обычно используется для эффективности, а третья вертикальная ось может использоваться для мощности. Для упрощения этого обсуждения КПД в зависимости от крутящего момента и мощность в зависимости от крутящего момента будут нанесены на тот же график, что и графики зависимости скорости от крутящего момента и тока от крутящего момента (пример показан ниже).
Составьте таблицу механической мощности двигателя в различных точках от момента холостого хода до момента остановки.Поскольку выходная механическая мощность — это просто произведение крутящего момента и скорости с поправочным коэффициентом для единиц (см. Раздел о вычислении начальной требуемой мощности), мощность может быть рассчитана с использованием ранее построенной линии для зависимости скорости от крутящего момента.
Примерная таблица расчетов для двигателя 2668W024CR показана в таблице 1. Затем на график наносится каждая расчетная точка мощности. Результирующая функция представляет собой параболическую кривую, показанную ниже на Графике 1. Максимальная механическая мощность достигается примерно при половине крутящего момента сваливания.Скорость в этот момент составляет примерно половину скорости холостого хода.
Создайте таблицу в электронной таблице КПД двигателя в различных точках от скорости холостого хода до крутящего момента при остановке. Приведено напряжение, приложенное к двигателю, и нанесен график силы тока при различных уровнях крутящего момента. Произведение тока двигателя и приложенного напряжения является мощностью, потребляемой двигателем. В каждой точке, выбранной для расчета, КПД двигателя η представляет собой выходную механическую мощность, деленную на потребляемую электрическую мощность.Опять же, примерная таблица для двигателя 2668W024CR показана в Таблице 1, а примерная кривая — на Графике 1. Максимальный КПД достигается примерно при 10% крутящего момента двигателя при остановке.
Определения сюжета
- Синий = скорость по сравнению с крутящим моментом ( n по сравнению с M )
- Красный = ток по сравнению с крутящим моментом ( I по сравнению с M )
- Зеленый = эффективность по сравнению с крутящим моментом ( η или . M )
- Коричневый = мощность в зависимости от крутящего момента ( P vs. М )
Характеристики двигателя
Примечание. Пунктирные линии представляют значения, которые могут быть получены для холодного двигателя (без повышения температуры), однако сплошные линии учитывают влияние магнита и змеевик подогрева на теплом моторе (об этом позже). Обратите внимание, как все четыре сплошных графика изменяются в результате увеличения сопротивления медных обмоток и ослабления. выходной крутящий момент из-за нагрева. Таким образом, ваши результаты могут немного отличаться в зависимости от того, холодный или теплый ваш двигатель, когда вы строите графики.Теоретический расчет параметров двигателя
Еще одним полезным параметром при выборе двигателя является постоянная двигателя. Правильное использование этой добротности существенно сократит итерационный процесс выбора двигателя постоянного тока. Он просто измеряет внутреннюю способность преобразователя преобразовывать электрическую мощность в механическую.
Максимальный КПД достигается примерно при 10% крутящего момента двигателя. Знаменатель называется потерей резистивной мощности. С помощью некоторых алгебраических манипуляций уравнение можно упростить до:
Имейте в виду, что k m (постоянная двигателя) не следует путать с k M (постоянная крутящего момента).Обратите внимание, что индекс константы двигателя — это строчная буква « м », в то время как индекс постоянной крутящего момента использует прописную букву « M ».
Для щеточного или бесщеточного двигателя постоянного тока относительно небольшого размера отношения, которые управляют поведением двигателя в различных обстоятельствах, могут быть выведены из законов физики и характеристик самих двигателей. Правило Кирхгофа по напряжению гласит: «Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала.Применительно к двигателю постоянного тока, последовательно соединенному с источником питания постоянного тока, правило Кирхгофа может быть выражено следующим образом: «Номинальное напряжение питания от источника питания должно быть равно по величине сумме падений напряжения на сопротивлении обмоток. и обратная ЭДС, генерируемая двигателем ».
Где:
U = Электропитание в В
I = Ток в А
R = Терминальное сопротивление в Ом
U E = Противо-ЭДС в В
Обратная ЭДС, создаваемая двигателем, прямо пропорциональна угловой скорости двигателя.Константа пропорциональности — это постоянная обратной ЭДС двигателя.
Где:
ω = Угловая скорость двигателя
k E = Постоянная обратной ЭДС двигателя
Следовательно, путем подстановки:
Постоянная противо-ЭДС двигателя обычно указывается производителем двигателя в В / об / мин или мВ / об / мин. Чтобы получить значимое значение для обратной ЭДС, необходимо указать скорость двигателя в единицах, совместимых с указанной постоянной обратной ЭДС.
«Сумма возрастаний потенциала в контуре цепи должна равняться сумме уменьшений потенциала».
(Правило напряжения Кирхгофа)
Постоянная двигателя зависит от конструкции катушки, силы и направления магнитных линий в воздушном зазоре. Хотя можно показать, что три обычно указанные постоянные двигателя (постоянная противо-ЭДС, постоянная крутящего момента и постоянная скорости) равны, если используются надлежащие единицы, расчет облегчается указанием трех констант в общепринятых единицах.
Крутящий момент, создаваемый ротором, прямо пропорционален току в обмотках якоря. Константа пропорциональности — это постоянная крутящего момента двигателя.
Где:
M м = крутящий момент, развиваемый на двигателе
k M = постоянная крутящего момента двигателя
Подставляя это соотношение для получения текущего ресурса:
Крутящий момент, развиваемый на роторе, равен моменту трения двигателя плюс момент нагрузки (из-за внешней механической нагрузки):
Где:
M R = Момент трения двигателя
M L = Момент нагрузки
Предполагая, что на клеммы двигателя подается постоянное напряжение, скорость двигателя будет прямо пропорциональна сумме момента трения и момента нагрузки.Константа пропорциональности — это наклон кривой крутящий момент-скорость. Моторные характеристики лучше, когда это значение меньше. Чем круче спад наклона, тем хуже производительность, которую можно ожидать от данного двигателя без сердечника. Это соотношение можно рассчитать по:
Где:
Δn = Изменение скорости
ΔM = Изменение крутящего момента
M H = Тормозной момент
n 0 = Скорость холостого хода
Альтернативный подход к получению этого значение — найти скорость, n :
Используя исчисление, мы дифференцируем обе стороны относительно M , что дает:
Хотя здесь мы не показываем отрицательный знак, это подразумевается что результат приведет к уменьшению (отрицательному) склон.
Пример расчета теоретического двигателя
Давайте немного углубимся в теоретические расчеты. Двигатель постоянного тока без сердечника 2668W024CR должен работать с напряжением 24 В на клеммах двигателя и крутящим моментом 68 мНм. Найдите результирующую константу двигателя, скорость двигателя, ток двигателя, КПД двигателя и выходную мощность. Из таблицы данных двигателя видно, что скорость холостого хода двигателя при 24 В составляет 7 800 мин -1 .Если крутящий момент не связан с валом двигателя, двигатель будет работать с этой скоростью.
Во-первых, давайте получим общее представление о характеристиках двигателя, вычислив постоянную двигателя k m . В этом случае мы получаем константу 28,48 мНм / кв.рт. (Вт).
Скорость двигателя под нагрузкой — это просто скорость холостого хода за вычетом снижения скорости из-за нагрузки. Константа пропорциональности для отношения между скоростью двигателя и крутящим моментом двигателя — это крутизна зависимости крутящего момента от крутящего момента.Кривая скорости, заданная делением скорости холостого хода двигателя на крутящий момент при останове. В этом примере мы вычислим снижение скорости (без учета температурных эффектов), вызванное нагрузкой крутящего момента 68 мНм, исключив единицы измерения мНм:
Теперь через замену:
В этом случае скорость двигателя под нагрузкой должна быть приблизительно:
Ток двигателя под нагрузкой складывается из тока холостого хода и тока, возникающего в результате нагрузки.
Константа пропорциональности тока и крутящего момента нагрузки — это постоянная крутящего момента ( k M ) . Это значение составляет 28,9 мНм / А. Взяв обратную величину, мы получаем постоянную тока k I , которая может помочь нам рассчитать ток при нагрузке. В этом случае нагрузка составляет 68 мНм, а ток, возникающий в результате этой нагрузки (без учета нагрева), приблизительно равен:
.Полный ток двигателя можно приблизительно определить, суммируя это значение с током холостого хода двигателя.В таблице данных указан ток холостого хода двигателя как 78 мА. После округления общий ток будет примерно:
.Выходная механическая мощность двигателя — это просто произведение скорости двигателя и крутящего момента с поправочным коэффициентом для единиц (при необходимости). Следовательно, выходная мощность двигателя будет примерно:
.Подводимая к двигателю механическая мощность является произведением приложенного напряжения и общего тока двигателя в амперах. В этом приложении:
Поскольку КПД η — это просто выходная мощность, деленная на входную мощность, давайте посчитаем ее в нашей рабочей точке:
Оценка температуры обмотки двигателя во время работы:
А ток I , протекающий через сопротивление R , приводит к потере мощности в виде тепла I 2 · R .В случае двигателя постоянного тока произведение квадрата полного тока двигателя и сопротивления якоря представляет собой потерю мощности в виде тепла в обмотках якоря. Например, если общий ток двигателя составлял 0,203 А, а сопротивление якоря 14,5 Ом, потери мощности в виде тепла в обмотках составят:
Тепло, возникающее в результате потерь в катушке I 2 · R , рассеивается за счет теплопроводности через компоненты двигателя и воздушного потока в воздушном зазоре. Легкость, с которой это тепло может рассеиваться в двигателе (или любой системе), определяется тепловым сопротивлением.
Термическое сопротивление (которое является обратной величиной теплопроводности) показывает, насколько хорошо материал сопротивляется теплопередаче по определенному пути. Производители двигателей обычно указывают способность двигателя рассеивать тепло, предоставляя значения термического сопротивления R th . Например, алюминиевая пластина с большим поперечным сечением будет иметь очень низкое тепловое сопротивление, тогда как значения для воздуха или вакуума будут значительно выше. В случае двигателей постоянного тока существует тепловой путь от обмоток двигателя к корпусу двигателя и второй тепловой канал между корпусом двигателя и окружающей средой двигателя (окружающий воздух и т. Д.).). Некоторые производители двигателей указывают тепловое сопротивление для каждого из двух тепловых путей, в то время как другие указывают только их сумму в качестве общего теплового сопротивления двигателя. Значения термического сопротивления указаны в увеличении температуры на единицу потери мощности. Суммарные потери I 2 · R в катушке (источнике тепла) умножаются на тепловые сопротивления для определения установившейся температуры якоря. Повышение температуры в установившемся режиме двигателя ( T ) определяется по формуле:
Где:
ΔT = Изменение температуры в К
I = Ток через обмотки двигателя в А
R = Сопротивление обмоток двигателя в Ом
R th2 = Тепловое сопротивление от обмоток к корпусу в к / Вт
R th3 = Тепловое сопротивление корпуса к окружающей среде, к / Вт
Давайте продолжим наш пример, используя двигатель 2668W024CR, работающий с током 2458 А в обмотках двигателя, с сопротивлением якоря 1, 03 Ом, тепловое сопротивление между обмоткой и корпусом составляет 3 к / Вт, а тепловое сопротивление между корпусом и окружающей средой — 8 к / Вт.Повышение температуры обмоток рассчитывается по формуле, приведенной ниже; мы можем заменить Ploss на I 2 · R :
Поскольку шкала Кельвина использует то же приращение единиц, что и шкала Цельсия, мы можем просто подставить значение Кельвина, как если бы оно было значением Цельсия. Если предполагается, что температура окружающего воздуха составляет 22 ° C, то конечная температура обмоток двигателя может быть приблизительно равна:
Где:
T теплый = Температура обмотки
Важно убедиться, что конечная температура обмоток не превышает номинальное значение двигателя, указанное в техническом паспорте.В приведенном выше примере максимально допустимая температура обмотки составляет 125 ° C. Поскольку расчетная температура обмотки составляет всего 90,4 ° C, тепловое повреждение обмоток двигателя не должно быть проблемой в этом приложении.
Можно использовать аналогичные вычисления, чтобы ответить на вопросы другого типа. Например, приложение может потребовать, чтобы двигатель работал с максимальным крутящим моментом, в надежде, что он не будет поврежден из-за перегрева. Предположим, требуется запустить двигатель с максимально возможным крутящим моментом при температуре окружающего воздуха 22 ° C.Дизайнер хочет знать, какой крутящий момент двигатель может безопасно обеспечить без перегрева. Опять же, в техническом описании двигателя постоянного тока без сердечника 2668W024CR указана максимальная температура обмотки 125 ° C. Итак, поскольку температура окружающей среды составляет 22 ° C, максимально допустимое повышение температуры ротора составляет: 125 ° C — 22 ° C = 103 ° C
Теперь мы можем рассчитать увеличение сопротивления катушки из-за рассеивания тепловой мощности:
Где:
α Cu = Температурный коэффициент меди в единицах K -1
(Обратный Кельвин)
Таким образом, из-за нагрева катушки и магнита из-за рассеивания мощности от потерь I 2 · R сопротивление катушки увеличилось с 1,03 Ом до 1,44 Ом.Теперь мы можем пересчитать новую постоянную крутящего момента k M , чтобы увидеть влияние повышения температуры на характеристики двигателя:
Где:
α M = Температурный коэффициент магнита в единицах K -1
(Обратный Кельвин)
Теперь мы пересчитываем новую константу обратной ЭДС k E и наблюдаем за результатами. Из формулы, полученной нами выше:
Как мы видим, постоянная крутящего момента ослабевает в результате повышения температуры, как и константа обратной ЭДС! Таким образом, сопротивление обмотки двигателя, постоянная крутящего момента и постоянная обратная ЭДС — все это отрицательно сказывается по той простой причине, что они зависят от температуры.
Мы могли бы продолжить вычисление дополнительных параметров в результате более горячей катушки и магнита, но наилучшие результаты дает выполнение нескольких итераций, что лучше всего выполняется с помощью программного обеспечения для количественного анализа. По мере того, как температура двигателя продолжает расти, каждый из трех параметров будет изменяться таким образом, что ухудшает характеристики двигателя и увеличивает потери мощности. При непрерывной работе двигатель может даже достичь точки «теплового разгона», что потенциально может привести к невозможности ремонта двигателя.Это может произойти, даже если первоначальные расчеты показали приемлемое повышение температуры (с использованием значений R и k M при температуре окружающей среды).
Обратите внимание, что максимально допустимый ток через обмотки двигателя может быть увеличен за счет уменьшения теплового сопротивления двигателя. Тепловое сопротивление между ротором и корпусом R th2 в первую очередь определяется конструкцией двигателя. Тепловое сопротивление корпуса R th3 можно значительно уменьшить, добавив радиаторы.Тепловое сопротивление двигателя для небольших двигателей постоянного тока обычно указывается для двигателя, подвешенного на открытом воздухе. Поэтому обычно наблюдается некоторый отвод тепла, который возникает в результате простой установки двигателя в теплопроводящий каркас или шасси. Некоторые производители более крупных двигателей постоянного тока указывают тепловое сопротивление, когда двигатель установлен на металлической пластине известных размеров и из материала.
Для получения дополнительной информации о расчетах электродвигателя постоянного тока без сердечника и о том, как на производительность электродвигателя может влиять рассеяние тепловой мощности, обратитесь к квалифицированному инженеру FAULHABER.Мы всегда готовы помочь.
Завод Инжиниринг | Соотношение крутящего момента и размера вала
Вы когда-нибудь задумывались, почему различные типы электродвигателей с одинаковой мощностью в лошадиных силах / киловаттах имеют разный диаметр вала или почему валы некоторых насосов намного меньше валов двигателей, которые их приводят в движение? А что насчет двигателей с полым валом? Элементарное понимание того, как определяются размеры вала, может быть полезно любому, кто работает с насосами, вентиляторами, лифтами или любым другим оборудованием с приводом от двигателя.
Чем больше, тем лучше — или, по крайней мере, раньше было
Отчасти благодаря традициям валы электродвигателей часто больше, чем валы оборудования, которым они управляют. Инженеры были очень консервативны сто лет назад, когда электродвигатели впервые получили широкое распространение в промышленности, поэтому при их проектировании обычно допускалась значительная погрешность. Сегодняшние инженеры в этом отношении мало что изменили. Например, стандартные размеры рамы NEMA, которые были пересмотрены только один раз с 1950 года, по-прежнему определяют гораздо большие размеры вала, чем того требуют общепринятые принципы машиностроения.
Основы конструкции вала
Размер вала определяется крутящим моментом, а не мощностью. Но изменения мощности и скорости (об / мин) влияют на крутящий момент, как показывает следующее уравнение:
Крутящий момент (фунт-фут) = л.с. x 5 252 / об / мин
Соответственно, для увеличения мощности потребуется больший крутящий момент, как и для уменьшения оборотов. Например, для двигателя мощностью 100 л.с., рассчитанного на 900 об / мин, потребуется вдвое больше крутящего момента, чем для двигателя мощностью 100 л.с., рассчитанного на 1800 об / мин.Каждый вал должен быть рассчитан на предполагаемую крутящую нагрузку.
Для определения необходимого минимального размера вала для двигателей используются два основных подхода, оба из которых дают консервативные результаты. Один метод требует сделать вал достаточно большим (и, следовательно, достаточно прочным), чтобы выдерживать указанную нагрузку без поломки. Инженеры-механики определяют это как способность передавать требуемый крутящий момент без превышения максимально допустимого напряжения сдвига при кручении материала вала.На практике это обычно означает, что минимальный диаметр вала может выдерживать, по крайней мере, двукратный номинальный крутящий момент двигателя.
Другой способ спроектировать вал — это рассчитать минимальный диаметр, необходимый для контроля крутильного прогиба (скручивания) во время эксплуатации. Для инженеров это означает, что допустимый крутящий момент или крутящий момент является функцией допустимого напряжения сдвига при кручении (в фунтах на квадратный дюйм или кПа) и модуля упругости полярного сечения (функция площади поперечного сечения вала).
Справочник по машинному оборудованию предоставляет следующие уравнения для определения минимальных размеров вала с использованием обоих подходов к проектированию: сопротивления крутильному прогибу и передачи крутящего момента.Обе системы уравнений основаны на стандартных значениях для стали с допустимыми напряжениями 4000 фунтов на квадратный дюйм (2,86 кг / мм 2 ) для силовых валов и 6000 фунтов на квадратный дюйм (4,29 кг / мм 2 ) для трансмиссионных валов с шкивы (иногда называемые шкивами). Некоторые из уравнений также относятся к валам с шпонкой или без шпонки, что удобно для пользователей насосов, которым необходимо знать, как рассчитывать валы с шпонкой и без шпонки.
Передача момента приближения
Большинство валов двигателей имеют шпонку, что увеличивает напряжение сдвига, действующее на вал.Учитывая это, конструкции вала двигателя обычно используют не более 75% максимального рекомендованного напряжения для вала без шпонки. Это еще одна причина, по которой валы электродвигателей часто больше, чем валы насосов, которые они приводят.
>> Уравнения 3-5 и примеры 1-4 см. На следующих страницах.
Пример 1
Рассмотрим двигатель мощностью 200 л.с. (150 кВт), 1800 об / мин. Для применения с прямым соединением стандартный размер рамы составляет 445TS с диаметром вала (шпоночного) 2.375 дюймов (60 мм). Используя уравнение [1], минимальный размер вала будет:
Или, в метрических единицах:
Чтобы увидеть, какой коэффициент запаса прочности учитывается в приведенных выше уравнениях, замените номинальную мощность 200 л.с. на 400 л.с.
Поскольку расчетный диаметр вала для двигателя мощностью 200 л.с. рассчитан на то, чтобы выдерживать удвоенный номинальный крутящий момент, диаметр вала 2,371 дюйма является абсолютным минимумом для номинальной мощности 400 л.с.
Устойчивость к скручиванию
Другой способ рассчитать минимальный размер вала двигателя — установить предел величины крутильного отклонения (скручивания), которое может произойти.Сопротивление скручивающим нагрузкам прямо пропорционально размеру вала: чем больше диаметр, тем больше сопротивление скручиванию.
Практическое правило при использовании этого метода заключается в том, что вал должен быть достаточно большим, чтобы он не отклонялся более чем на 1 градус на длине, в 20 раз превышающей его диаметр. Чтобы рассчитать минимальный размер вала, соответствующий этой спецификации, используйте следующее уравнение:
Пример 2
Для двигателя 200 л.с. (150 кВт), 1800 об / мин из Примера 1, минимальный размер вала для ограничения крутильного прогиба будет:
Или, в метрических единицах:
Минимальные диаметры вала, рассчитанные с помощью методов передачи крутящего момента и крутильного отклонения, по существу одинаковы для примеров 1 и 2.Тем не менее, хороший подход — рассчитать размер в обоих направлениях, а затем использовать большее значение в качестве абсолютного минимума.
>> Конструкции полого вала, уравнение 5 и примеры 3-4 см. На следующей странице.
Конструкции с полым валом
Непосредственно связанные нагрузки оказывают скручивающее усилие (кручение) на вал, вызывая наибольшую деформацию вблизи поверхности или радиуса и очень небольшую — на внутренней части. Это делает конструкцию с полым валом практичной для вертикальных двигателей.Эти конструкции позволяют валу насоса проходить через полый вал двигателя, что упрощает процесс соединения валов насоса, которые должны поддерживать столб тяжелой воды, связанный с глубокой скважиной.
Расчет диаметра вала для вертикального двигателя с полым валом не такой простой. Две переменные — внешний и внутренний диаметры полого вала — не стандартизированы, что делает невозможным упрощение расчета с помощью соотношения. По этой причине легче продемонстрировать, достаточно ли конкретного полого вала для данной номинальной мощности.
Пример 3
Двигатель с полым валом мощностью 200 л.с. (150 кВт), 1800 об / мин имеет внешний диаметр вала 3 дюйма (76 мм) и внутренний диаметр 2 дюйма (51 мм). Чтобы определить, достаточно ли этого размера вала для передачи необходимого крутящего момента, решите следующее уравнение для P :
В этом примере мощность P должна быть больше 200 л.с., чтобы вал был достаточно большим, чтобы выдерживать крутящий момент двигателя.
Теоретически этот вал способен передавать 1700 л.с., так что этого более чем достаточно для 200 л.с.
Пример 4
Величина крутящего момента, который может передать полый вал, зависит от толщины стенки между его внутренним и внешним диаметром. Более тонкая стена не может выдержать такой же крутящий момент, как более толстая. 3-дюйм. вал в Примере 3 был способен передавать 1700 л.с. и имел стенку толщиной ½ дюйма: (3 дюйма — 2 дюйма) / 2 дюйма = ½ дюйма. вал передачи, если бы стена была только ¼ дюйма толщиной?
Эффект от более тонкой стены впечатляет.Вал с диаметром 0,25 дюйма. стена может выдерживать менее 20% крутящего момента вала со стенкой ½ дюйма.
Подведение итогов
Инженерыобычно проектируют с учетом достаточного запаса прочности, и, в частности, старое оборудование было сконструировано чрезмерно даже по сегодняшним стандартам. Конечно, это одна из причин, по которой многие из нас ценят старую технику. Это было достаточно сложно, чтобы противостоять человеческим ошибкам, таким как неправильная центровка.
В любом случае имейте в виду, что добавление шпоночной канавки к существующему валу ослабляет вал.Точно так же увеличение диаметра отверстия полого вала снижает допустимый крутящий момент. Рассматривайте модификацию вала только при наличии хорошей инженерной поддержки. Даже в этом случае помните, что чем серьезнее последствия отказа, тем более значительным должен быть коэффициент безопасности. В конце концов, кто хочет использовать лифт, который был спроектирован и построен без учета запаса прочности?
Чак Юнг (Chuck Yung) — старший специалист по технической поддержке Ассоциации обслуживания электроаппаратуры (EASA).
Основные сведения об определении размеров двигателя, часть 4
Помимо крутящего момента нагрузки, момента ускорения, скорости и инерции нагрузки, игнорирование определенных параметров размера во время процесса выбора двигателя может буквально сломать или сломать вашу машину.
Рабочие характеристики двигателя описываются его характеристиками крутящего момента и скорости. Конструктивная прочность двигателя описывается его характеристиками радиальной и осевой нагрузки. В характеристиках крутящего момента и скорости двигателя указано , если двигатель может выполнить задачу. Технические характеристики двигателя по радиальной и осевой нагрузке указывают , как долго двигатель может выполнять эту задачу.
Конструктивная прочность двигателя достигается за счет комбинированной механической жесткости его корпуса, фланцевых кронштейнов и узла выходного вала.Для мотор-редуктора он также включает шестерни и дополнительные подшипники. Однако подшипники, расположенные ближе всего к нагрузке, «несут» большую часть этой нагрузки. Излишне говорить, что характеристики радиальной и осевой нагрузки двигателя или редуктора во многом связаны с его подшипниками.
Ниже мы показываем внутреннюю структуру двигателя переменного тока и его редуктор . Те же концепции осевой нагрузки и радиальной нагрузки применимы ко всем типам двигателей.
| Начнем с изнанки.Единственный вращающийся элемент двигателя — это ротор (4) и вал (5) в сборе, которые поддерживаются двумя шарикоподшипниками (6) с обоих концов. Снаружи ротора, разделенный очень тонким воздушным зазором, находится статор (2). Фланцевый кронштейн (1) и корпус двигателя (3) завершают внешнюю конструкцию. Вся сборка выдерживает все статические и динамические силы внутри двигателя при его номинальной нагрузке. | |
| В редукторе (или коробке передач), который устанавливается на вал-шестерню двигателя, каждая зубчатая передача и выходной вал поддерживаются собственным подшипником, в то время как входной вал (шестерня двигателя) по-прежнему поддерживается подшипником двигателя.Обратите внимание, что подшипник, поддерживающий вал шестерни (и нагрузку), самый большой. Фланец шестерни и корпус редуктора завершают внешнюю конструкцию. Вся сборка выдерживает все статические и динамические силы в редукторе при номинальной нагрузке. |
Подшипник выходного вала в редукторе обычно больше, чем подшипник выходного вала в двигателе, потому что нагрузка на вал редуктора будет намного больше, чем нагрузка на вал двигателя.
На изображениях ниже показаны радиальная нагрузка (радиальная нагрузка) и осевая нагрузка (осевая нагрузка) сил, действующих на вал двигателя и редуктор.
| Радиальная нагрузка (также известная как радиальная нагрузка) |
Радиальная нагрузка определяется как максимальная сила, которая может быть приложена к валу в радиальном направлении (в любом направлении, перпендикулярном оси вала двигателя). Радиальная нагрузка также называется «радиальная нагрузка » из-за того, как нагрузка может «свисать» с вала. Радиальные нагрузки зависят от расстояния между точкой установки радиальной нагрузки и опорным подшипником.
| Осевая нагрузка (также известная как осевая нагрузка) |
Осевая нагрузка определяется как максимальная сила, которая может быть приложена к валу в осевом направлении (по той же оси, что и ось вала двигателя, или параллельно ей). Осевая нагрузка также упоминается как «осевая нагрузка », поскольку осевая сила и осевая нагрузка являются силами, действующими на одну и ту же ось. Типичная осевая нагрузка составляет примерно половину веса двигателя, хотя с годами она увеличивалась.
Эти силы могут действовать в любом направлении.
Например, если двигатель имеет осевую нагрузку 100 Н, это означает, что двигатель может подвешивать на своем валу нагрузку 100 Н (если вал направлен вниз) или выдерживать нагрузку на своем валу (если вал лицом вверх). 100 Н (ньютонов) равняются примерно 10 кг.
| Почему эти спецификации важны? |
Характеристики как радиальной, так и осевой нагрузки связаны с прочностью или механической жесткостью подшипников, вала и корпуса в сборе. Превышение этих характеристик может привести к повреждению шарикоподшипников, например отслаиванию дорожки качения и тел качения, или поломке выходного вала.
Например, при превышении допустимой радиальной нагрузки вал может начать изгибаться и в конечном итоге сломаться. При превышении допустимой осевой нагрузки подшипник двигателя или редуктора может выйти из строя и в конечном итоге выйти из строя. В любом случае двигатель перестанет работать или у него сократится срок службы.Опорный элемент, ближайший к нагрузке, обычно ломается первым.
СОВЕТ: Простой тест шарикоподшипника |
Чтобы проверить внутреннее повреждение двигателя или редуктора, вы можете отключить питание и снять двигатель с редуктора, а затем вручную провернуть вал по часовой стрелке и против часовой стрелки. Если двигатель или редуктор повреждены, вы почувствуете разное сопротивление в разных направлениях, услышите необычный шум или вообще не сможете вращать вал. |
Насколько рано может закончиться срок службы, будет пропорционально тому, насколько и как долго будут превышены эти спецификации. Например, поскольку наши шарикоподшипники рассчитаны на срок службы 10 000 часов, превышение технических требований по радиальной или осевой нагрузке на 10% может сократить срок их службы примерно на 1000 часов.
Если вас интересует оценка срока службы на основе срока службы подшипников, свяжитесь с нашими квалифицированными инженерами службы технической поддержки.
| Как отображаются эти спецификации? |
Производители могут указывать эти характеристики по-другому.Обычно в таблице (см. Пример ниже) перечислены допустимые радиальные и осевые нагрузки в соответствии с размером редуктора и передаточным числом. Допустимая осевая нагрузка остается прежней, а допустимая радиальная нагрузка зависит от «расстояния от конца выходного вала редуктора».
PS: В этой таблице перечислены допустимые радиальные и осевые нагрузки только для обычных мотор-редукторов переменного тока. Когда в качестве передаточного механизма используется цепь, шестерня, ремень и т. Д., На вал редуктора всегда действует радиальная нагрузка.Для шаговых двигателей указаны допустимые радиальные и осевые нагрузки двигателей.
| Эффект «SeeSaw / Fulcrum» (для радиальной нагрузки) |
В приведенной выше таблице вы можете видеть, что радиальная нагрузка изменяется в соответствии с «расстоянием от конца выходного вала редуктора». Это расстояние от конца вала нагрузки до точки приложения силы к валу (а также расположение установленной нагрузки).Допустимая радиальная нагрузка увеличивается по мере увеличения расстояния от конца вала, потому что это также означает, что нагрузка приближается к опорному подшипнику, расположенному прямо внутри фланца редуктора. Большую нагрузку можно выдержать, если груз «подвешен» ближе к опорному подшипнику, который в данном случае является точкой опоры.
Для объяснения этой концепции обычно используется «качели / точка опоры».
Статические и динамические радиальные и осевые нагрузки
Подобно динамическим и статическим моментным нагрузкам, радиальная или осевая нагрузка также имеет как динамические, так и статические компоненты.Таблица выше используется для определения обоих.
Например, статическая радиальная нагрузка включает в себя вес шкива и натяжение ремня в состоянии покоя. Динамическая радиальная нагрузка, требующая расчета, включает силы от одного веса шкива и натяжения ремня во время движения. Статической осевой нагрузкой будет вес шкива, если вал двигателя находится в вертикальном положении. Динамическая осевая нагрузка будет ниже статической осевой нагрузки, поэтому обычно учитывается только статическая осевая нагрузка.Убедитесь, что значения находятся под опубликованными значениями на диаграмме.
| СОВЕТ : Не забудьте включить натяжение ремня как радиальную силу |
| Не забудьте выбрать размер для натяжения ремня! В старые добрые времена, когда я работал инженером службы технической поддержки, чрезмерное натяжение ремня во многих случаях было причиной проблем с двигателем. |
Для обеспечения надлежащего обращения со всеми радиальными и осевыми нагрузками убедитесь, что выполняются следующие условия:
- Статическая радиальная нагрузка ниже значения, указанного в таблице.
- Динамическая радиальная нагрузка ниже значения, указанного в таблице.
- Статическая осевая нагрузка ниже значения, указанного в таблице.
| Уравнение для динамических радиальных нагрузок |
Для радиальных нагрузок существует дополнительный компонент «динамической» радиальной нагрузки, который представляет собой радиальную нагрузку при движении. Также убедитесь, что рассчитанное значение находится ниже значения в таблице (см. Выше).
Когда шкивы, ремни, шестерни, звездочки, цепи и т. Д. используются в качестве передаточного механизма, динамическая радиальная нагрузка рассчитывается по следующему уравнению.
Вт = т / год
В ленточном конвейере крутящий момент двигателя обеспечивает движущую силу, которая вызывает работу. Это отображается как T, который представляет собой крутящий момент в Н · м. Если мы считаем y (эффективный радиус в метрах) радиусом шкива, то мы можем вычислить радиальную нагрузку или W (объем работы).
Фактическое уравнение немного сложнее, поскольку учитываются коэффициент нагрузки и коэффициент обслуживания.
Другие факторы, такие как метод привода и тип нагрузки, необходимо учитывать при оценке радиальной нагрузки. Например, при использовании метода плоской ременной передачи значение радиальной нагрузки увеличивается.
Что касается эксплуатационного фактора, который связан с условиями эксплуатации, такие факторы, как частый запуск и остановка нагрузки, а также изменение направления вращения, могут повлиять на радиальную нагрузку.
Хорошо, время для практики.
| Пример: расчет радиальной нагрузки конвейера |
Взгляните на приведенный ниже пример применения ленточного конвейера.Как вы, , рассчитаете значение необходимой радиальной нагрузки , которая вам понадобится от двигателя?
Я работаю на цепно-зубчатом (звездочном) конвейере и использую двигатель 2ИК6 с редуктором 360: 1. Мне нужен крутящий момент 10 Н · м на звездочке диаметром 0,1 м (эффективный). Я предполагаю, что натяжение цепи составляет около 10 Н. Я собираюсь вращаться только в одном направлении. Моя звездочка установлена в 10 мм от конца вала.
Может ли мой мотор-редуктор выдерживать радиальную и осевую нагрузку от моего приложения?
Первые вопросы, которые я задаю себе: какое уравнение я использую (мы это знаем) и есть ли у меня все переменные?
Поскольку мы живем в идеальном мире, все переменные, необходимые для расчетов, представлены и представлены в предпочтительных единицах измерения.На самом деле обычно требуется больше работы. Например, обратите внимание, что коэффициент нагрузки и коэффициент обслуживания не были указаны, но были указаны метод привода и тип нагрузки. Кроме того, предоставленные значения могут быть в разных единицах, поэтому может потребоваться дополнительный этап преобразования единиц.
Еще раз нам нужно:
Убедитесь, что эти условия выполняются:
- Статическая радиальная нагрузка ниже значения, указанного в таблице.
- Динамическая радиальная нагрузка ниже значения, указанного в таблице.
- Статическая осевая нагрузка ниже значения, указанного в таблице.
Статическая радиальная нагрузка — это натяжение ремня. Значение 10 N было приблизительным, но это лучшая информация, которая у нас есть на данный момент, поэтому мы воспользуемся ею. На расстоянии 10 мм от конца вала наша максимальная радиальная нагрузка для двигателя 2ИК6 составляет 200 Н, так что здесь у нас все хорошо.
Подставьте значения для каждой переменной в уравнении динамической радиальной нагрузки.
Вт = то, что мы решаем для радиальной нагрузки в Ньютонах.
К = 1; конвейер цепно-зубчатый
T = 10 Н · м
f = 1; равномерная нагрузка / однонаправленный непрерывный режим
y = эффективный радиус шкива = 0,1 метра (эффективный радиус — это место, где ремень контактирует с поверхностью шкива)
W = K x T x f / y
W = 1 x 10 x 1 / 0,1
W = 100 Н
100 Н ниже допустимого значения радиальной нагрузки 200 Н, так что здесь у нас все хорошо.
Статическая осевая нагрузка на данный момент фактически неизвестна, но, глядя на изображение приложения, у нас не должно быть большой статической осевой нагрузки, и она определенно должна быть ниже значения 40 Н в таблице, так что здесь у нас все хорошо, слишком.
Двигатель 2ИК6 с редуктором с передаточным числом 360: 1 сможет выдерживать как радиальные, так и осевые нагрузки.
Большинство программ для определения размеров двигателя не учитывают осевые или радиальные нагрузки, поэтому не забудьте подтвердить свою радиальную нагрузку и осевую нагрузку после выбора двигателя.
В большинстве случаев тщательный подбор двигателя требует больше работы, чем вы думаете. Если ваше время так ценно, как мы думаем, позвольте нашим специалистам помочь!
Чтобы проконсультироваться с нами по выбору двигателя, воспользуйтесь нашим, выберите одно из распространенных приложений (показано ниже) и заполните поля. Отчет о размерах, включая расчеты, может быть создан. Наши опытные инженеры службы технической поддержки будут более чем счастливы проанализировать ваш отчет о размерах двигателя вместе с вами, чтобы убедиться, что вы покупаете правильный двигатель в первый раз (нам также не нравятся RMA).
Как я уже упоминал ранее, правильный выбор двигателя зависит от предоставленной информации. Пользователи часто увеличивают размеры двигателей, потому что либо не знают точной информации, необходимой для определения размеров, либо хотят продлить срок службы двигателя.
В следующем посте этой серии я подумаю о том, чтобы дать несколько советов по выбору двигателя.
Похожие сообщения:
СОВЕТ: Есть ли более простой способ подобрать двигатели? |
Используйте инструмент для определения размеров двигателя.После определения размера двигателя наши инженеры службы технической поддержки при необходимости проведут вас через процесс выбора продукта. Пример: индексная таблица |
Таблица фланцев двигателя — краткий справочник типичных размеров двигателей (Control In Motion)
В Motor Technology мы стремимся предоставить стандартный продукт для любого вашего применения. Совместимость разных двигателей становится серьезной проблемой, когда вы ищете замену.Чтобы помочь вам определить требуемый размер двигателя, воспользуйтесь приведенной ниже таблицей. Это ни в коем случае не исчерпывающий список, но он представляет собой некоторые из типичных размеров, с которыми мы сталкиваемся ежедневно:
| Размер двигателя | Диаметр втулки (A) | Монтажное отверстие PCD (HC 2 ) | Диаметр монтажного отверстия (d) | Диаметр вала двигателя (D) | Длина вала двигателя (L) | |
| IEC56 | B14 | 70 | 85 | 7 | 9 | 20 |
| IEC56 | B5 | 80 | 100 | 7 | 9 | 20 |
| IEC63 | B14 | 60 | 75 | 6 / M5 | 11 | 23 |
| IEC63 | B5 | 95 | 115 | 9 | 11 | 23 |
| IEC71 | B14 | 70 | 85 | 7 / M6 | 14 | 30 |
| IEC71 | B5 | 110 | 130 | 9 | 14 | 30 |
| IEC80 | B14 | 80 | 100 | 7 / M6 | 19 | 40 |
| IEC80 | B5 | 130 | 165 | M10 | 19 | 40 |
| IEC90 | B14 | 95 | 115 | 9 / M8 | 24 | 50 |
| IEC90 | B5 | 130 | 165 | M10 | 24 | 50 |
| IEC100 / 112 | B14 | 110 | 130 | 9 / M8 | 28 | 60 |
| IEC100 / 112 | B5 | 180 | 215 | M12 | 28 | 60 |
| Сервопривод 80 1 | 80 | 100 | 7 | 14 | 30 | |
| Сервопривод 95 1 | 95 | 115 | 9 | 19 | 40 | |
| Сервопривод A200 | 130 | 165 | 11 | 24 | 50 |
1 согласно DIN 42950
2 Расстояние до центра отверстия, также называемое PCD или диаметром делительной окружности
Источник: Danaher Motion, Girard, Tramec, Zebotronics и другая коммерческая литература.
% PDF-1.7 % 8 0 объект > эндобдж xref 8 76 0000000016 00000 н. 0000002128 00000 н. 0000002251 00000 п. 0000003411 00000 н. 0000003443 00000 н. 0000003580 00000 н. 0000003716 00000 н. 0000004255 00000 н. 0000004589 00000 н. 0000004624 00000 н. 0000005646 00000 н. 0000006038 00000 п. 0000007182 00000 н. 0000007491 00000 п. 0000007957 00000 н. 0000008298 00000 н. 0000009483 00000 н. 0000010242 00000 п. 0000010546 00000 п. 0000011295 00000 п. 0000012127 00000 п. 0000012924 00000 п. 0000013900 00000 п. 0000016548 00000 п. 0000016661 00000 п. 0000016776 00000 п. 0000016887 00000 п. 0000017001 00000 п. 0000017113 00000 п. 0000017196 00000 п. 0000021095 00000 п. 0000021651 00000 п. 0000022237 00000 п. 0000023661 00000 п. 0000023990 00000 п. 0000024396 00000 п. 0000026105 00000 п. 0000026425 00000 н. 0000026817 00000 п. 0000027551 00000 п. 0000027844 00000 н. 0000028182 00000 п. 0000029613 00000 п. 0000029953 00000 п. @ ia & 덌 \? | ZY.H08 = 0, pst`! Q @ mpT`aԜAy7Cs’ĉ
Ключ к выбору правильного размера корпуса
Чтобы быть уверенным, что вы заказываете двигатель, подходящий для вашего конкретного применения, вы должны понимать обозначения корпуса двигателя.
Миниатюризация касается не только электроники. И вы, наверное, знаете, что в наши дни автопроизводители ставят больше пони в меньшие двигатели. То же самое произошло с промышленными двигателями. По сравнению со своими предшественниками, современные двигатели обладают большей мощностью при меньших физических размерах.К счастью, Национальная ассоциация производителей электрооборудования (NEMA) предоставляет нам стандартизацию типоразмеров, так что вы можете сделать разумный выбор среди двигателей разных размеров.
Стандартизация типоразмеров является ключевой частью взаимозаменяемости двигателей. Это означает, что одни и те же мощность, скорость и корпус, как правило, будут иметь одинаковый размер корпуса от разных производителей двигателей. Таким образом, вы можете заменить двигатель одного производителя на аналогичный двигатель другого производителя, если оба они имеют стандартные размеры.
Благодаря стандартизации у нас есть три группы типоразмеров. Самый старый — оригинальный. В 1952 году производители установили новое назначение рам: U-образные рамы. Они представили Т-образные рамы в 1964 году.
Двигатели оригинального размера (до 1952 г.), которые все еще существуют, потребуют замены в ближайшем будущем. И да, такие моторы работают и сегодня. Например, на Панамском канале по-прежнему используются два двигателя, которые работают столько же, сколько и сам канал.
Кроме того, многие двигатели с U-образной рамой, которые следовали за оригинальными двигателями, в конечном итоге выйдут из строя и потребуют замены.Таким образом, вам нужен надежный справочный материал по размерам кадров и некоторые знания об изменениях, которые произошли в рамках так называемых программ перерейтинга.
Двигатели с одинаковыми тремя цифрами типоразмера имеют одинаковое расстояние между монтажными отверстиями в основании и одинаковую высоту вала.
Изменение номиналов и температуры. Почему мы можем переоценить моторные рамы, чтобы получить больше лошадиных сил в раме? По большей части это результат усовершенствования конструкции двигателя и изоляционных материалов. Более новая изоляция позволяет двигателю работать намного сильнее; и, таким образом, справиться с дополнительным теплом, выделяемым при выработке большей мощности.
Исходные размеры корпуса NEMA работали при очень низких температурах, но двигатели с U-образной рамой имеют изоляцию класса A с номиналом 105 ° C. Моторы с Т-образной рамой еще больше нагреваются. Их изоляция класса B имеет номинальную температуру 130 ° C. Это повышение температурной способности сделало возможным соответствующее увеличение мощности в корпусе того же размера.
Чтобы приспособиться к большей механической мощности в лошадиных силах, размеры вала и подшипников пришлось увеличить. Таким образом, оригинальная рама 254 (5 л.с. при 1800 об / мин) имеет один и одну восьмую дюйма.вал. Рама 254U (7,5 л.с. при 1800 об / мин) имеет один и три восьмых дюйма. вал, а рама 254Т (15 л.с. при 1800 об / мин) имеет один и пять восьмых дюймов. вал. Диаметр подшипников также увеличился, чтобы приспособиться к валам большего размера и большим нагрузкам, связанным с более высокой мощностью.
Рамочная основа. На первый взгляд система нумерации размеров кадра может показаться капризной, но в этом есть некоторая логика. Например, первые две цифры трехзначного размера корпуса относятся к высоте вала двигателя на лапах (жесткое основание) в четверти дюйма.Вы можете использовать это значение для определения высоты вала (размер D). Просто разделите первые две цифры на четыре. Таким образом, рама 405 (исходная, U-образная или T-образная) имеет высоту вала 40, деленную на 4, или 10 дюймов.
Хотя прямое измерение в дюймах к нему не относится, третья цифра трехзначного размера корпуса указывает длину корпуса двигателя. Чем длиннее корпус двигателя, тем больше расстояние между отверстиями для крепежных болтов в основании (больше размер F). Например, рама 145T имеет больший размер F, чем рама 143T.
Термин «дробная мощность в лошадиных силах» охватывает те типоразмеры, которые имеют двухзначные обозначения, а не трехзначные обозначения. Размеры рамы, обычно связанные с двигателями с дробной мощностью, составляют 42, 48 и 56. В этом случае каждый размер рамы обозначает конкретную высоту вала, диаметр вала и расположение отверстий для торцевых или базовых отверстий.
В этих двигателях конкретные назначения рам не связаны с мощностью и скоростью. Таким образом, вполне возможно, что определенная комбинация мощности и скорости может существовать в трех разных размерах рамы.В этом случае важно знать размер рамы, а также мощность, скорость и тип корпуса.
Двузначный номер корпуса соответствует высоте вала в шестнадцатых долях дюйма. Вы можете предположить, что 48-рамный двигатель будет иметь высоту вала 48, разделенную на 16, или 3 дюйма. Точно так же 56-рамный двигатель имеет высоту вала 3,5 дюйма.
Начиная с модели 56 и выше, двигатели доступны в лошадиных силах, превышающих те, которые обычно ассоциируются с дробными. Например, 56-рамочные двигатели развивают мощность до 5 л.с.По этой причине называть двигатели с двузначными размерами корпуса «дробными» несколько вводит в заблуждение.
Выбор подходящего двигателя — сложный процесс. Но если вы знаете размер кадра, вы значительно упростите процесс.
Этот текст представляет собой адаптацию «Документов Коверна», любезно предоставленных компанией Baldor Electric Co., Уоллингфорд, Коннектикут, отредактированной Марком Ламендолой, техническим редактором EC&M. Кауэрн — разработчик приложений Baldor.
Все, что вам нужно знать (обновление 2021 года)
В наши дни подвесным электродвигателямуделяется много внимания: они бесшумны, чисты и не требуют обслуживания, БЕЗ запаха топлива или выхлопных газов.
В связи с ажиотажем, связанным с мощными подвесными моторами, кажется, что электрические подвесные моторы теперь предлагают жизнеспособную альтернативу двигателям внутреннего сгорания, что делает их отличным вариантом для многих лодок, включая байдарки, швертботы, каноэ, надувные лодки и парусные лодки.
Но цена электрического подвесного двигателя может снова поставить вас перед дилеммой.
Стоит ли предварительные вложения в электрический подвесной мотор? Каков диапазон и время работы электрических подвесных двигателей? Какой электрический подвесной мотор самый мощный из доступных и доступных сегодня?
В этом посте мы рассмотрим всю информацию об электрических подвесных моторах для лодок и поможем вам выбрать лучший электрический подвесной двигатель, который соответствует вашим потребностям.
Содержание:
Примечание редактора: Электрические подвесные моторы, а также другие электромобили измеряются в Вт (ваттах), а не в л.с. (лошадиных силах). Итак, если вы ищете подвесной электрический мотор мощностью 3 л.с., то это должен быть подвесной двигатель мощностью 1000 Вт, который имеет мощность, эквивалентную бензиновому мотору мощностью 3 л.с.
Чтобы помочь вам лучше понять диапазон мощности подвесных электродвигателей, особенно для тех, кто плохо знаком с электродвигателями, мы просто будем использовать HP для описания мощности подвесных электродвигателей в этом посте.
Электрические подвесные моторы — это не троллинг-моторы
Прежде чем мы углубимся в подробности, давайте проясним, что здесь мы говорим об электрических подвесных моторах. Не троллинговые моторы или подвесные двигатели с электрическим запуском.
В отличие от двигателей малого хода (измеряемых в статической тяге), которые могут работать только на низкой скорости малого хода, настоящие электрические подвесные двигатели могут обеспечивать гораздо более высокую мощность: они предназначены для использования в качестве основного источника энергии.
Даже небольших подвесных лодочных моторов, например, популярного подвесного мотора мощностью 3 л.с., будет достаточно для катания на лодках весом до одного.5 тонн, включая швертботы, надувные лодки и небольшие парусники, на скорости 5 узлов .
Если вы не знаете, какой из них выбрать между подвесным электродвигателем и двигателем малого хода (например, моторы Minn Kota), ознакомьтесь с нашим предыдущим постом для подробного сравнения.
Электрический подвесной мотор для лодки: что нужно знать
Электрический подвесной мотор определенно привлекателен, но объем информации в Интернете может быть огромным и сбить с толку, особенно если вы новичок в электрических лодках.
Здесь я собрал 5 наиболее часто задаваемых вопросов (с быстрыми ответами), чтобы вы могли легко решить, покупать ли электрический подвесной мотор для вашей лодки.
Время работы и запас хода электрического подвесного мотора
Любопытно узнать, какое время автономной работы и запас хода у электрических подвесных моторов в морской среде. «Я не хочу, чтобы на воде закончился заряд».
Это пресловутый вопрос, связанный со строкой.
Время работы и запас хода электрического подвесного мотора зависят от того, с какой скоростью вы им управляете, насколько тяжелая лодка, какая сила прилива в каком направлении, состояние заряда аккумулятора, температура… и еще много других факторов.
Вообще говоря, с подвесным мотором Spirit 1.0 Plus мощностью 3 л.с. с электроприводом на половинной мощности вы должны проехать 16 миль.
Большинство лодочных электродвигателей позволяют регулировать скорость на более низкую скорость для увеличения дальности и продолжительности работы. Кроме того, вы всегда можете прочитать оставшийся уровень заряда батареи / расчетный диапазон на экране, так что вы никогда не застрянете.
Вот таблица, в которой показан расчетный диапазон и время работы подвесного электрического подвесного двигателя 6 л.с. на разных уровнях скорости при одной зарядке одной батареи.
Электрические подвесные моторы Диапазон, время работы и скорость
| Мощность (Вт) | Скорость (миль / час) | Время работы (чч: мм) | Диапазон (мили) | |||||||
| 500 | 4 | 4 | 4 | 72 | ||||||
| 1000 | 5 | 9:00 | 45 | |||||||
| 2000 | 6.7 | 4:30 | 30,2 | |||||||
| 3000 | 8 | 3:00 | 24 | |||||||
| 4000 | 11,5 | 2:15 | 25,9 | 2:15 | 25,9 | 1:50 | 24,7 | |||
| 6000 | 15 | 1:30 | 22,5 |
* Данные собраны с ePropulsion Navy 6.0 электрический подвесной мотор на 12-футовой алюминиевой лодке (с эксклюзивным ePropulsion E175 аккумулятор это 8690 Втч).
Проверьте полный отчет об испытаниях подвесного электрического мотора Navy 6.0.
Скорость электрического подвесного мотора
Итак, насколько быстрыми электрические лодочные моторы?
Максимальная скорость подвесных электромоторов сильно различается для разных лодок и рабочих условий. Чем выше мощность, тем выше скорость.
Ниже вы найдете подборку реальных отчетов об испытаниях с использованием подвесного электрического мотора ePropulsion Spirit 1.0 в различных стилях лодки.
| Тип лодки | Максимальная скорость (миль / ч) | Полный отчет об испытаниях | |||
| West Marine RU-250 Roll-Up Inflatable Boat | 9068 | Отчет № 1 | RS 21 Парусная лодка | 5.5 | Отчет № 2 |
| Csónaképít e.BALIN Túra | 6.2 | Отчет № 3 | |||
| Liteboat LiteXP | 6,1 9683 | 9069 9069 подвесной двигатель с электроприводом, чтобы ваша лодка двигалась на более высокой скорости глиссирования? Это по-прежнему серьезная проблема для современных технологий.Как я уже упоминал выше, электрические подвесные моторы нуждаются в большой емкости аккумулятора, чтобы поддерживать высокую скорость. Количество заряда батареи, необходимое для движения лодки, в 10 раз больше, чем у автомобиля. Допустим, вы можете развивать скорость до 5 узлов с подвесным электромотором мощностью 10 л.с. А если вы хотите разогнаться до 15 узлов, вам, вероятно, понадобится электрический подвесной двигатель мощностью 100 л.с., который требует гораздо больше энергии и батареи, чем мы можем себе представить, и будет стоить целое состояние. Вот почему подвесные электродвигатели мощностью менее 20 л.с. (двигатели 3/4/5/10 л.с.) по-прежнему остаются основным направлением на потребительском рынке. Электрический подвесной мотор ЦенаЭлектрические подвесные двигатели — это интересно, но я не понимаю, почему они стоят больше, чем бензиновые подвесные двигатели. Подумайте о проблемах, связанных с размером батареи и запасом хода в электрических подвесных моторах: Для электрического подвесного лодочного мотора требуется аккумулятор большой емкости, особенно если вы планируете длительную поездку. Учитывая, что батареи имеют более низкую плотность энергии по сравнению с бензиновыми, а лодка примерно в 5-10 раз менее экономична по сравнению с автомобилем аналогичного веса, вам потребуется много энергии (т.е.е. аккумуляторы), хранящиеся на подвесном электрическом моторе, чтобы толкать лодку. А батарейки дорогие. Другая причина заключается в том, что в отрасли еще не реализована экономия на масштабе, хотя в наши дни электрические подвесные моторы становятся все более популярными. Исключение: Фактически, электрический подвесной мотор мощностью 3 л.с. превосходит бензиновый подвесной двигатель по цене (и практически по любой функциональности, которая может вам понадобиться для лодочного подвесного двигателя), если вы берете плату за обслуживание (180 долларов в год, если вы не обслуживаете его, вы теряете гарантию) и стоимость топлива / электроэнергии с учетом. Возьмите ePropulsion Spirit Plus , подвесной электрический мотор мощностью 3 л.с. со встроенным аккумулятором, например: То есть с подвесным электродвигателем Spirit 1.0 Plus до начала экономии осталось всего 3 года. А по мере увеличения времени обслуживания вы можете еще больше сэкономить. Итак, на самом деле электрические подвесные моторы — это рентабельный вариант в течение нескольких лет использования. Примечание: Возможно, вы находитесь на рынке бывшего в употреблении электрического подвесного мотора и ищете его во время специальных распродаж или на веб-сайте со скидками.Но не рекомендуется идти этим путем, так как продаваемые электрические подвесные моторы не могут гарантировать вам полную гарантию. Зарядка аккумулятора подвесного электродвигателяХорошая новость заключается в том, что большинство подвесных электродвигателей можно полностью зарядить за ночь. Так что это удобно и не будет мешать вашему расписанию. Некоторые известные производители подвесных электродвигателей, такие как ePropulsion, также имеют функцию быстрой зарядки, которая может сократить время зарядки вдвое. Также возможна солнечная зарядка, вы можете одновременно разряжать и заряжать аккумулятор, что означает, что вы можете расширить радиус действия своей лодки в солнечные дни Дополнительный совет: Если вы любитель парусного спорта, обязательно обратите внимание на электрические подвесные моторы с гидрогенерацией, такие как серия ePropulsion Evo.Он использует энергию ветра для зарядки своих батарей во время плавания, поэтому вы можете иметь дополнительную мощность для расширенного диапазона плавания или зарядки других устройств на борту. Вес подвесного электродвигателяВес подвесного электрического мотора и аккумулятора может быть проблемой, особенно для пожилых людей. Кататься на лодке приятно, но таскать тяжелые батареи по болотистому грунту, чтобы добраться до лодки в отдаленных районах, определенно не соблазнительно. Если вы ищете переносной подвесной электрический мотор, рассмотрите вариант со встроенным аккумулятором.Электрический подвесной мотор с аккумулятором легко транспортировать и избавит вас от многих проблем. Некоторые батареи для электрических подвесных двигателей могут даже плавать в воде, поэтому не нужно беспокоиться о том, чтобы их уронить при установке подвесного двигателя. Ищете подвесной электродвигатель большей мощности? Для питания подвесного двигателя потребуются автономные батареи. Если вы идете по этому пути, мы рекомендуем обратить внимание на линейку аккумуляторов LiFePO4 серии E серии . Аккумуляторы для электрических подвесных моторов серии E имеют модульную систему от 2 до 144 кВт. Это очень доступные морские аккумуляторы с длительным сроком службы. Причины выбрать электрические подвесные моторыКакие электрические подвесные моторы хороши? Преимущества электрических подвесных моторов очевидны для рыболовов и почти огромны для тех, кто ищет плавание на лодке премиум-класса. Ознакомьтесь с четырьмя главными причинами, по которым сотни тысяч людей выбирают электрические подвесные двигатели.
С увеличением количества регионов и озер, запрещающих использование двигателей внутреннего сгорания, электрические подвесные моторы стали единственным вариантом для некоторых рыболовов и любителей катания на лодках. Это новая тенденция, которая может стать будущим судоходства. Подвесные электродвигатели могут также работать как вспомогательный двигатель (кикер, вспомогательный двигатель). Многие пользователи также считают его полезным в экстренных случаях, если основной двигатель сломается. Лучшие подвесные электродвигатели в 2021 годуВы какое-то время пытались купить подвесной электродвигатель, но понятия не имели, какой подвесной мотор самый надежный? Какой электрический подвесной мотор самый лучший? Вот две главные рекомендации, которым доверяют десятки тысяч пользователей по всему миру. №1. Электрический подвесной мотор 3 л.с.: ePropulsion Spirit 1.0 PlusЕсли вы ищете надежный, доступный и портативный электрический подвесной мотор для швертбота, надувных и рыболовных лодок, парусных лодок и тендеров, Spirit 1.0 Плюс ваш лучший выбор. Этот подвесной электрический мотор со встроенным аккумулятором обеспечивает мощность, эквивалентную 3 л.с., и может проехать до 22 миль со скоростью 4,5 миль в час или работать весь день на скорости троллинга. Особенности:
В качестве подвесного электрического мотора для соленой и пресной воды Spirit долговечен и эффективен для использования в озере, море и просто в любой окружающей среде. Посмотрите, как Spirit ведет себя в воде, на обзоре настоящего электрического подвесного мотора:
Если вы хотите увеличить мощность гидрогенерации, обратите внимание на Spirit 1.0 Evo. Вам понравится в плавании. Если вам нужен подвесной электродвигатель большей мощности для лодок, алюминиевых рыболовных судов, круизных парусников и круизных лодок, обязательно ознакомьтесь с ePropulsion Navy 6.0 подвесной. С этим подвесным электрическим мотором мощностью 6 кВт 9,9 (10) л.с. вы можете легко преодолеть 40 миль на одной подзарядке или целый день ловить рыбу на скорости троллинга. Особенности:
Узнайте, что пользователи говорят о Navy 6.0 электрический подвесной мотор:
Хотите совершить бесплатную тестовую поездку с этими двумя рекомендованными электрическими подвесными моторами? Заполните эту форму , и мы свяжемся с вами в ближайшее время. Часто задаваемые вопросы об электрических подвесных моторахОдно сообщение не могло ответить на все вопросы об электрических подвесных двигателях. Ниже мы отобрали наиболее часто задаваемые вопросы с краткими ответами. Если у вас возникнут какие-либо сомнения по поводу электрических подвесных моторов, оставьте их в комментарии, и мы свяжемся с вами в ближайшее время и добавим ваш в список. №1. Насколько надежны электрические подвесные двигатели? Лопасть электрического подвесного мотора обычно изготавливается из твердых материалов, а двигатели ePropulsion оснащены функцией аварийного останова при столкновении гребного винта. Тем не менее, камень или устричный ложе все еще могут вызвать повреждение мотора. Если вы беспокоитесь, вы всегда можете защитить подвесной двигатель с помощью какой-нибудь защиты гребного винта. №2. Какой электрический подвесной мотор самый мощный? Самый мощный подвесной электродвигатель на сегодняшний день имеет номинальную мощность 80 л.с. и в основном предназначен для коммерческого использования из-за высокой начальной стоимости. № 3. Электрический подвесной двигатель какого размера мне нужен? Чтобы получить электрический подвесной мотор нужного размера, вам необходимо учитывать размер лодки (вес / длину), загрузку лодки, желаемую скорость, условия катания и т. Д. В целом, электрического подвесного мотора мощностью 1 кВт 3 л.с. достаточно, чтобы обеспечить удовлетворительную скорость и запас хода для тендеров, лодок и круизных судов до 1,5 тонн, а подвесной электромотор мощностью 6 кВт и 10 л.с. предназначен для надводных лодок, рыболовных лодок и круизных парусных лодок до 6 тонн. . Электрический подвесной мотор для лодки: последние мыслиБлагодаря непревзойденным преимуществам, таким как бесшумность, чистота, отсутствие выхлопных газов и более низкая общая стоимость после нескольких лет использования, электрические подвесные моторы со временем становятся все более популярными. В ближайшие годы вы увидите все больше и больше подвесных электродвигателей для парусных лодок, байдарок, каноэ и шлюпок, которые будут использоваться в ближайшие годы, особенно при поддержке правительства. Если вам интересно, но вы не уверены, какой тип и размер электрического подвесного мотора вам больше всего подходит, оставьте нам сообщение в комментариях, и мы постараемся помочь вам найти лучший вариант. Если вы ищете электрический подвесной мотор в Великобритании, США, Новой Зеландии, Канаде, Австралии или любых других регионах мира и хотите быструю доставку, вы можете проверить местных дилеров и заказать прямо у них с твердой поддержка, если возникнет проблема. . |