


| | Адрес этой страницы (вложенность) в справочнике dpva.ru: главная страница / / Техническая информация / / Оборудование / / Электродвигатели. Электромоторы. / / Синхронные скорости вращения асинхронных электродвигателей в зависимости от частоты (10-100 Гц) и числа полюсов (2-12), Таблица и формула для расчета. Поделиться:
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Если Вы не обнаружили себя в списке поставщиков, заметили ошибку, или у Вас есть дополнительные численные данные для коллег по теме, сообщите , пожалуйста. Вложите в письмо ссылку на страницу с ошибкой, пожалуйста. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Коды баннеров проекта DPVA.ru Начинка: KJR Publisiers Консультации и техническая | Проект является некоммерческим. Информация, представленная на сайте, не является официальной и предоставлена только в целях ознакомления. Владельцы сайта www.dpva.ru не несут никакой ответственности за риски, связанные с использованием информации, полученной с этого интернет-ресурса. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


Принцип работы асинхронного двигателя | Заметки электрика
Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Итак, поехали.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:
- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.
Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).
Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Эта частота называется, асинхронной.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:
Выразим из этой формулы частоту вращения ротора:
Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)
Вот его бирка.
Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):
Найдем величину скольжения для этого двигателя:
Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).
А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.
Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.
Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.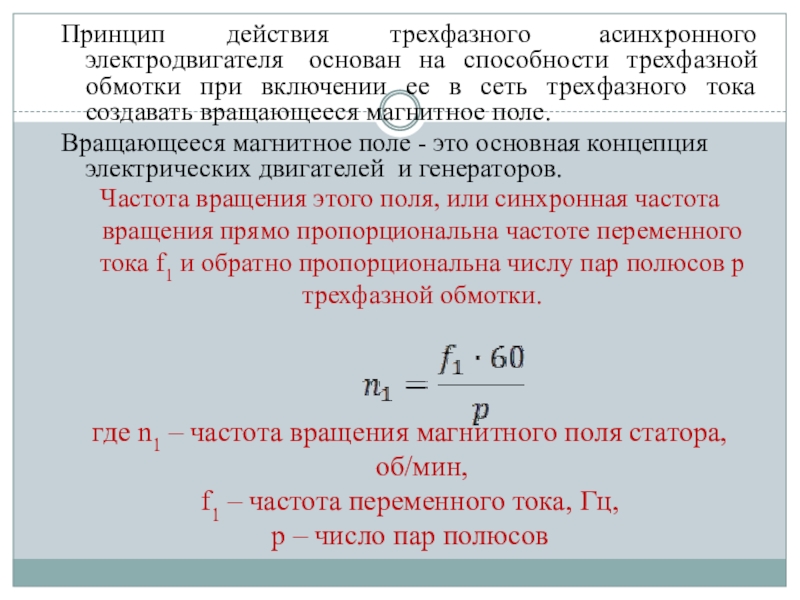
P.S. На этом статью про принцип работы асинхронного двигателя я завершаю. Спасибо за внимание.
Если статья была Вам полезна, то поделитесь ей со своими друзьями:
Карта сайта
АО «НИИтурбокомпрессор им. В.Б. Шнеппа» (Группа ГМС)
Россия, Республика Татарстан420029, г. Казань, Сибирский тракт, 40
Тел: +7 (843) 272-31-52, 221-53-01
[email protected] © 2021 АО «НИИтурбокомпрессор им. В.Б. Шнеппа»
Вы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Комплексные решения» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьВы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа»
и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
В.Б. Шнеппа»
и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Вы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьВы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьВы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьВы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьВы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьВы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа»
и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
В.Б. Шнеппа»
и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Вы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьВы покидаете сайт ЗАО «НИИтурбокомпрессор им. В.Б. Шнеппа» и переходите в раздел «Продукция» сайта ОАО «Казанькомпрессормаш»
Продолжить ОтменитьКак измерить частоту вращения асинхронного двигателя. Как определить скорость вращения электродвигателя Проверить обороты мультиметром
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту. Трехфазный двигатель можно питать и от однофазной сети, для этого параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.
Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор. По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра. Итак, начнем по порядку и разберем данный вопрос с примерами.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту
Про асинхронные электродвигатели (смотрите — ) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса. Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой. Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково. Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения. В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту
Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту
Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
При эксплуатации любой машины не обойтись без электродвигателя. Многие покупают электродвигатель с рук без какой-либо документации. В такой ситуации возникает проблема с определением оборотов электродвигателя. Чтобы решить данную проблему, можно использовать несколько способов.
Самый простой способ определения оборотов электродвигателя – использование тахометра. Но наличие данного прибора у человека, не специализирующегося на электродвигателях, большая редкость. Поэтому существуют способы определения оборотов на глаз.
Для определения оборотов электродвигателя откройте одну из крышек электродвигателя и найдите катушку обмотки. Катушек в электродвигателе может быть несколько. Выберете ту катушку, которая находится в зоне видимости и к которой проще доступ.
Старайтесь не нарушить целостность электродвигателя, не доставайте детали. Не пробуйте отсоединить детали между собой.
Но наличие данного прибора у человека, не специализирующегося на электродвигателях, большая редкость. Поэтому существуют способы определения оборотов на глаз.
Для определения оборотов электродвигателя откройте одну из крышек электродвигателя и найдите катушку обмотки. Катушек в электродвигателе может быть несколько. Выберете ту катушку, которая находится в зоне видимости и к которой проще доступ.
Старайтесь не нарушить целостность электродвигателя, не доставайте детали. Не пробуйте отсоединить детали между собой. Скорость вращения ротора – 1000 оборотов в минуту, если размер катушки составляет одну четвертую по отношению к кольцу.
Скорость вращения ротора – 1000 оборотов в минуту, если размер катушки составляет одну четвертую по отношению к кольцу.Все основные характеристики электродвигателя должны быть указаны на металлической бирке, располагающейся на его корпусе. Но на практике бирка или отсутствует, или информация стерлась в течение эксплуатации.
Электродвигатель – обмотка статора
Время от времени в процессе работы, нужно найти количество оборотов асинхронного электродвигателя, на котором отсутствует бирка. И далековато не каждый электрик с этой задачей может совладать. Но мое мировоззрение, что каждый электрослесарь в этом должен разбираться. На собственном рабочем месте, как говорится – по долгу службы, вы понимаете все свойства собственных движков. А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
А перебежали на новое рабочее место, а там ни на одном движке нет бирок. Найти количество оборотов электродвигателя, даже очень просто и просто. Определяем по обмоттке. Для этого нужно снять крышку мотора. Лучше это проделывать с задней крышкой, т. к. шкив либо полумуфту снимать не нужно. Довольно снять кожух
остывания и крыльчатку и крышка мотора доступна. После снятия крышки обмотку видно довольно отлично. Найдите одну секцию и смотрите сколько
Движок – 3000 об/мин
места она занимает по окружности круга (статора). А сейчас запоминайте, если катушка занимает половину круга (180 град.) – это движок на 3000 об/мин.
Движок – 1500 об/мин
Если в окружности вместится три секции (120 град.) – это движок 1500 об/мин. Ну и если в статоре вмещается четыре секции (90 град.) – этот движок на 1000 об/мин. Вот так совершенно просто можно найти количество оборотов “неизвесного” электродвигателя. На представленных рисунках это видно отлично.
Движок – 1000 об/мин
Это способ определения, когда катушки обмоток намотаны секциями. А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
А бывают обмотки “всыпные”, таким способом уже не найти. Таковой способ намотки встречается изредка.
Еще есть один способ определения количество оборотов. В роторе электродвигателя, есть остаточное магнитное поле, которое может наводить небольшую ЭДС в обмотке статора, если мы будем крутить ротор. Эту ЭДС можно “изловить” – миллиамперметром. Наша задачка заключается в следующем: необходимо отыскать обмотку одной фазы, независимо как соединены обмотки, треугольником либо звездой. И к кончикам обмотки подключаем миллиамперметр, вращая вал мотора, смотрим сколько раз отклонится стрелка миллиамперметра за один оборот ротора и вот по этой таблице поглядеть, что за движок вы определяете.
(2p) 2 3000 r/min
(2p) 4 1500 r/min
(2p) 6 1000 r/min
(2p) 8 750 r/min
Вот такие обыкновенные и думаю понятные два способа определения колличества оборотов на котором отсутствует бирка (табличка).
В СССР выпускался прибор ТЧ10-Р, может у кого и сохранился. Кто не лицезрел и не знал о таком измерителе, предлагаю поглядеть фото собственного. В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
В комплекте имеется две насадки, – для измерения оборотов по оси вала и 2-ая для измерения по окружности вала.
Измерить колличество оборотов можно и при помощи “Цифрового лазерного тахометра”
“Цифровой лазерный тахометр”
Технические свойства:
Спектр: 2,5 об / мин ~ 99999 об / ми
Разрешение / шаг: 0,1 об / мин для спектра 2,5 ~ 999,9 об / мин, 1 об / мин 1000 об / мин и поболее
Точность: + / – 0,05%
Рабочее расстояние: 50mm ~ 500mm
Также указывается малое и наибольшее значение
Для тех кому реально необходимо – просто супер вещь!
Л. Рыженков
Старые и бывшие в использовании асинхронные машины советского производства считаются наиболее качественными и долговечными. Однако, как известно многим электромеханикам, шильдики на них могут быть абсолютно нечитабельными, да и в самом двигателе мог быть перемотан. Определить номинальную частоту вращения можно по количеству полюсов в обмотке, но если речь идет о машинах с фазным ротором или разбирать корпус нет желания, можно прибегнуть к одному из проверенных методов.
Определение скорости при помощи графического рисунка
Для определения скорости вращения двигателя существует графических рисунков круглой формы. Суть в том, что приклеенный на торец вала бумажный кружок с заданным узором при вращении образует определенный графический эффект при освещении источником света с частотой в 50Гц. Таким образом, перебрав несколько рисунков и сравнив результат с табличными данными можно определить номинальную скорость вращения двигателя.Типовые характеристики по монтажным размерам
Промышленные производства СССР, как и большинство современных, производились по государственным стандартам и имеют установленную таблицу соответствия. Исходя из этого, можно замерить высоту центра вала относительно плоскости посадки, его и задний диаметры, а также размеры крепежных отверстий. В большинстве случаев этих данных будет достаточно, чтобы найти в таблице нужный двигатель и не только определить частоту вращения, но и установить его электрическую и полезную мощность.
При помощи механического тахометра
Очень часто нужно определить не только номинальную характеристику электрической машины, но и знать точное количество оборотов в данный момент. Это делается при диагностике электрических двигателей и для определения точного показателя коэффициента скольжения.В электромеханических лабораториях и на производстве используются специальные приборы — тахометры. Если получить доступ к такому оборудованию, измерить частоту вращения асинхронного двигателя можно за несколько секунд. Тахометр имеет стрелочный или цифровой циферблат и измерительную штангу, на конце которой имеется отверстие с шариком. Если смазать центровочное отверстие на валу вязким воском и плотно приставить измерительную штангу к нему, на циферблате отобразится точное количество оборотов в минуту.
При помощи детектора стробоскопического эффекта
Если двигатель находится в процессе эксплуатации, можно избежать необходимости отстыковывать его от исполнительного механизма и снимать задний кожух только для того, чтобы добраться до центровочного отверстия. Точное количество оборотов в этих случаях можно также измерить при помощи стробоскопического детектора. Для этого на вал двигателя наносят продольную риску белого цвета и устанавливают светоулавливатель прибора напротив нее.
Точное количество оборотов в этих случаях можно также измерить при помощи стробоскопического детектора. Для этого на вал двигателя наносят продольную риску белого цвета и устанавливают светоулавливатель прибора напротив нее.При включении двигателя в работу прибор определит точное количество оборотов в минуту по частоте появления белого пятна. Этот метод применяется, как правило, при диагностическом обследовании мощных электрических машин и зависимости частоты вращения от приложенной нагрузки.
Использование кулера от персонального компьютера
Для проведения измерений частоты вращения двигателя можно использовать весьма оригинальный метод. В нем применяется лопастной вентилятор охлаждения от персонального компьютера. Пропеллер крепится к торцу вала при помощи двустороннего скотча, а рама вентилятора удерживается вручную. Провод вентилятора подключается к любому из разъемов материнской платы, на котором можно провести измерения, при этом само питание на кулер подавать не нужно. Точный показатель частоты вращения можно получить через утилиту BIOS или диагностическую утилиту, работающую под управлением операционной системы.
Точный показатель частоты вращения можно получить через утилиту BIOS или диагностическую утилиту, работающую под управлением операционной системы.Частота вращения двигателя — ООО «Полимер-Строй-Снаб»
15.09.2013
Частота вращения двигателя регулируется изменением постоянного напряжения на его якоре, поступающего от выпрямителя Д1- Дб с регулируемым переменным напряжением на входе, собранного на кремниевых вентилях ВК2–200 и охлаждаемого вентилятором Вен. Напряжение на входе выпрямителя регулируется в пределах 0–440 В потенциал-регулятором, т. е. асинхронным Двигателем с фазовым ротором МЗ типа МТ-51–8. Ротор двигателя заторможен и может плавно поворачиваться электромотором М4 через червячный редуктор и цепную передачу. Дополнительное, плавное регулирование приводного электродвигателя достигается подачей переменного напряжения от автотрансформатора Тр2 на вход мостовой выпрямительной схемы Д7-Д10, питающей обмотки независимого возбуждения. Частота вращения двигателя Ml измеряется двухстрелочным электрическим дистанционным тахометром, датчик которого Мб через редуктор Рт соединен с валом двигателя, а измеритель М7 вынесен на пульт управления установкой; реактивный момент — с помощью весов. А если вам интересно строительство домов из оцилиндрованного бревна (сайт) то мы подскажем где модно его заказать по низким ценам.
А если вам интересно строительство домов из оцилиндрованного бревна (сайт) то мы подскажем где модно его заказать по низким ценам.
Вся пусковая, регулирующая и контрольно-измерительная аппаратура смонтирована на пульте управления установленном в операторском помещении для обеспечения дистанционного управления электроприводом в соответствии с требованиями радиационной -безопасности и общей охраны труда.
Основной спецификой конструкции всех разработанных автором экспериментальных установок, несмотря на отличие их габаритов и мощности привода, является форма, объем, проходные сечения и отделка внутренних (омываемых маслом) полостей корпусов, трубопроводов и арматуры, которые обеспечивают устойчивую ориентацию потока масла и отсутствие утечек его из системы, предотвращают образование застойных зон и осаждение продуктов износа (нарушающее воспроизводимость радиометрических измерений), облегчают очистку и дезактивацию деталей после очередного испытания.
 youtube.com/embed/hU9krurbi0c» frameborder=»0″ allowfullscreen=»allowfullscreen»/>
youtube.com/embed/hU9krurbi0c» frameborder=»0″ allowfullscreen=»allowfullscreen»/>
Асинхронный двигатель
Асинхронный двигатель — это электрический двигатель переменного тока, частота вращения ротора которого не равна частоте вращения магнитного поля, создаваемого током обмотки статора.
50A Регулятор скорости двигателя (PWM)
от CanaKit
- Напряжение питания / нагрузки: от 9 до 24 В постоянного тока (рекомендуется 12 В постоянного тока)
- Дополнительный ЖК-модуль
- Функция плавного пуска
- Максимальный длительный ток: 50 А при 100 Гц
- Частота:
- Фиксированная (100 Гц)
- Регулируемая ( 244 Гц до 3.
 125 кГц)
125 кГц) - Диапазон рабочего цикла ШИМ: 0% — 100%
- Высокоэффективная конструкция с использованием высокомощного полевого МОП-транзистора для охлаждения
- Включает большие двойные лопаточные клеммы для простоты подключения проводов
- Включает радиатор
- Включает вентилятор 12 В постоянного тока , В комплекте ручки
 125 кГц)
125 кГц)Описание товара
Управляйте скоростью двигателя постоянного тока без ущерба для крутящего момента.Этот контроллер двигателя постоянного тока с широтно-импульсной модуляцией (ШИМ) может обеспечивать максимальный непрерывный ток до 50 А для вашего двигателя постоянного тока или другой нагрузки постоянного тока благодаря конструкции на основе цифрового микроконтроллера (PIC) и высокоэффективному полевому МОП-транзистору высокой мощности для работы в режиме охлаждения. Также доступен дополнительный ЖК-модуль (деталь CanaKit # LCD1133), который будет точно указывать текущую установленную частоту и рабочий цикл для точного управления ШИМ-сигналом. Контроллер имеет два режима работы: фиксированная или регулируемая частота.В режиме работы с фиксированной частотой контроллер работает на частоте 100 Гц. В режиме работы с переменной частотой частота регулируется от 244 Гц до 3,125 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Контроллер также предлагает встроенную функцию плавного пуска, которая значительно снижает механическую нагрузку на двигатель, а также электродинамическую нагрузку на подключенные кабели и батарею, тем самым увеличивая время автономной работы. продолжительность жизни всей системы. Когда питание подключено к цепи, рабочий цикл начинается с 0% и повышается до заданного значения примерно от 1 до 1.5 секунд. Вентилятор 12 В постоянного тока входит в комплект поставки контроллера мотора для надежной и надежной непрерывной работы при высоких нагрузках. Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Области применения: управление двигателем, HHO, диммер постоянного / светодиодного света, управление нагревом и т.
Контроллер имеет два режима работы: фиксированная или регулируемая частота.В режиме работы с фиксированной частотой контроллер работает на частоте 100 Гц. В режиме работы с переменной частотой частота регулируется от 244 Гц до 3,125 кГц. Рабочий цикл полностью регулируется от 0% до 100% в обоих режимах. Контроллер также предлагает встроенную функцию плавного пуска, которая значительно снижает механическую нагрузку на двигатель, а также электродинамическую нагрузку на подключенные кабели и батарею, тем самым увеличивая время автономной работы. продолжительность жизни всей системы. Когда питание подключено к цепи, рабочий цикл начинается с 0% и повышается до заданного значения примерно от 1 до 1.5 секунд. Вентилятор 12 В постоянного тока входит в комплект поставки контроллера мотора для надежной и надежной непрерывной работы при высоких нагрузках. Обратите внимание, что вентилятор постоянного тока рассчитан только на работу с напряжением питания до 12 В постоянного тока. Области применения: управление двигателем, HHO, диммер постоянного / светодиодного света, управление нагревом и т. Д. Размеры: 4,03 «x 2,82»
Д. Размеры: 4,03 «x 2,82»
VFD или симистор для асинхронных двигателей переменного тока?
Когда на асинхронный двигатель переменного тока подается напряжение, он работает с определенной скоростью.Требования к переменной скорости для асинхронных двигателей переменного тока обычно выполняются трехфазным двигателем и инвертором или частотно-регулируемым приводом. В этом сообщении в блоге также представлен еще один вариант.
Во-первых, давайте поговорим о наиболее распространенном методе регулирования скорости для асинхронных двигателей переменного тока, которым является инвертор или частотно-регулируемый привод (VFD). Я больше всего знаком с серией FRENIC Mini C2 от Fuji Electric.
ЧРП Fuji Electric FRENIC Mini C2
Как это устройство контролирует скорость двигателя переменного тока? Давайте сначала поймем, почему двигатель работает с определенной скоростью.С математической точки зрения синхронная скорость двигателя рассчитывается по формуле:
Большинство промышленных асинхронных двигателей переменного тока являются 4-полюсными, поэтому скорость двигателя синхронизируется с частотой входного источника питания (Гц). При 60 Гц двигатель будет работать со скоростью 1800 об / мин.
При 60 Гц двигатель будет работать со скоростью 1800 об / мин.
Частотно-регулируемый привод управляет скоростью двигателя с помощью ШИМ (широтно-импульсной модуляции) для изменения частоты источника питания, подаваемого на двигатель. Как правило, от двигателя нет обратной связи; хотя некоторые диски используют обратную ЭДС в качестве обратной связи.
Вот блок-схема логики управления частотно-регулируемым приводом FRENIC Mini C2 (из руководства). Обратите внимание на его сложность из-за огромного количества компонентов. Для повышения производительности обычно предлагаются такие функции, как динамическое усиление крутящего момента или управление компенсацией скольжения.
Одним из недостатков использования частотно-регулируемых приводов является то, что они могут быть дорогими и сложными в размере. Также требуется трехфазный асинхронный двигатель переменного тока с номинальной мощностью инвертора или, по крайней мере, с номинальной продолжительностью.Если двигатель оснащен тормозным механизмом, он обычно сокращает рабочий цикл. Я видел частотно-регулируемые приводы для однофазных двигателей на рынке в прошлом, но их трудно найти, и мы никогда не тестировали их с нашими двигателями.
Другой способ управления скоростью однофазных асинхронных двигателей переменного тока?
Теперь давайте посмотрим на другой метод управления скоростью. Взгляните на кривую крутящего момента однофазного асинхронного двигателя переменного тока, которая описывает, что двигатель будет делать после включения. Двигатель запускается со скоростью 0 об / мин, затем разгоняется до номинальной скорости.Обратите внимание, как входное напряжение влияет на форму кривой скорость-крутящий момент. Если момент нагрузки остается прежним, а входное напряжение снижается со 100 В до 90 В, то скорость двигателя снижается. Да, вы можете использовать напряжение для управления скоростью двигателя переменного тока .
ПРИМЕЧАНИЕ: максимальная скорость составляет ~ 1500 об / мин, поскольку входная мощность составляет 50 Гц. Для двигателей 60 Гц частота вращения 1500 об / мин будет равна 1800 об / мин.
Однако вы можете видеть, что скорость не сильно уменьшается при падении напряжения на 10 В.Если напряжение снижается слишком сильно, двигатель может быть вынужден работать в нестабильной области (менее ~ 1000 об / мин) и, возможно, заглохнет. В идеале вы действительно хотите, чтобы двигатель работал с оптимальной номинальной скоростью для наилучшей и наиболее эффективной работы. Этот метод управления скоростью очень похож на метод управления скоростью щеточных двигателей постоянного тока. Однако диапазон оборотов управления скоростью намного шире у щеточных двигателей постоянного тока.
Чтобы этот метод управления был успешным, необходимо устройство обратной связи, чтобы замкнуть контур между двигателем и регулятором скорости.Эта обратная связь необходима для предотвращения слишком сильных колебаний скорости двигателя (и входного напряжения).
Oriental Motor использует тахогенераторы для замыкания контура между нашими двигателями с регулируемой скоростью переменного тока и контроллерами скорости, такими как серии DSC или US2. Тахогенератор, он же тахометр, вырабатывает напряжение, пропорциональное скорости. Он используется в непрерывном контуре обратной связи для поддержания точности скорости на уровне ± 1% или меньше.
Это упрощенная схема цепи управления для серии DSC.
Для всех, кому интересно, это схема цепи управления с более подробной информацией. Вы можете видеть, что мы используем TRIAC для управления напряжением. Также мы используем однополупериодный выпрямитель.
Показывает, как тахогенератор используется во время работы двигателя.
Поскольку схема управления намного менее сложна, чем у частотно-регулируемого привода, двигатели с регулируемой скоростью переменного тока являются более экономичным вариантом по сравнению с двигателями переменного тока с приводом от частотно-регулируемого привода. Метод управления фазой также демонстрирует меньший электрический шум по сравнению с двигателями с приводом от частотно-регулируемого привода, где частотно-регулируемые приводы переключаются с гораздо большей скоростью.
Еще одно преимущество, представленное в серии DSC, — это вертикальная работа. В прошлом двигатели тахогенераторов были проблемой при вертикальном перемещении. Причина в гравитации.
В этом примере двигатель перемещает груз вниз по ленточному конвейеру. Когда груз опускается, сила тяжести будет тянуть груз вниз и увеличивать его скорость. По мере увеличения скорости увеличивается напряжение тахогенератора. Это заставляет контроллер скорости думать, что двигатель движется слишком быстро, что снижает его напряжение, чтобы попытаться снизить скорость.Однако при понижении напряжения двигатель теряет крутящий момент. Этот процесс повторяется до тех пор, пока крутящий момент двигателя не истощится и нагрузка не упадет. В серии DSC функция останова при замедлении позволяет осуществлять контролируемое замедление с автоматическим электромагнитным торможением. |
Недостатком двигателей переменного тока с регулировкой скорости с обратной связью от тахогенератора является то, что на низких скоростях двигатель имеет определенные ограничения по крутящему моменту. Кривая крутящего момента скорости двигателя помечена, чтобы показать это. Убедитесь, что вы работаете ниже «линии безопасной эксплуатации». Для комбинированных типов (мотор-редукторы) см. Пунктирную линию, обозначенную «Допустимый крутящий момент для комбинированного типа».
Другими словами, чтобы избежать этой проблемы, используйте мотор-редуктор.
Чтобы узнать больше о серии DSC или ее методе управления скоростью, прочтите официальный документ.
Подпишитесь, пожалуйста, в правом верхнем углу страницы!
| Есть ли другая альтернатива? | ||||||
Если требуется работа при более низких температурах, идеальным вариантом является более высокая энергоэффективность, лучшее регулирование скорости, постоянный выходной крутящий момент или более широкий диапазон скоростей. Для таких применений, как сдвоенные ленточные конвейеры, машины для полировки / удаления заусенцев или перемешивающие машины, слишком сильные колебания скорости из-за нагрузки могут повлиять на конечный продукт. Если постоянный крутящий момент и регулировка скорости имеют решающее значение, а системы серводвигателей выходят за рамки бюджета, стоит подумать о бесщеточных двигателях.
Щелкните ниже, чтобы сравнить 3 доступные технологии управления скоростью. |
Решения для высокоскоростных электродвигателей
Определение
Скорость двигателя — это величина скорости вращения вала двигателя. В приложении движения скорость двигателя определяет, насколько быстро ось вращается — количество полных оборотов в единицу времени. Приложения различаются по требованиям к скорости, в зависимости от того, что перемещается, и от согласованности с другими компонентами машины.Необходимо достичь баланса между скоростью и крутящим моментом, поскольку двигатели обычно создают меньший крутящий момент при работе на более высоких скоростях.
Обзор решения
Мы учитываем требования к скорости в процессе проектирования, создавая оптимальные конфигурации катушек (обычно называемых обмотками) и магнитов. В некоторых конструкциях катушка вращается в зависимости от конструкции двигателя. Создание конструкции двигателя, исключающей объединение железа с катушкой, приводит к более высоким скоростям. Инерция этих высокоскоростных двигателей резко снижена, что также увеличивает ускорение (отзывчивость).В некоторых конструкциях магнит вращается вместе с валом. Поскольку магнит является фактором, способствующим инерции двигателя, требуется разработка конструкции, отличной от конструкции стандартного цилиндрического магнита. Снижение инерции приводит к увеличению скорости, а также ускорению.
Portescap Technology
Portescap разработал высокоскоростные двигатели для наших бесщеточных технологий постоянного и щеточного постоянного тока с самонесущими катушками ротора высокой плотности. Безжелезная природа щеточных катушек постоянного тока обеспечивает как высокое ускорение, так и более высокие скорости, особенно по сравнению с щеточными двигателями постоянного тока с конструкцией с железным сердечником.Portescap предлагает уникальную серию шаговых двигателей, серию дисковых магнитов, которые имеют тонкий дисковый магнит в отличие от цилиндрического магнита. За счет снижения инерции двигателей мы можем достичь скорости до 10 000 об / мин с шаговым двигателем, что не имеет аналогов в отрасли. Свяжитесь с нами сегодня, чтобы узнать, как мы можем помочь вам найти подходящие высокоскоростные двигатели для ваших критически важных приложений.
Высокоскоростные двигатели Portescap идеально подходят для следующих применений:
Использование пиков коммутации двигателя постоянного тока для измерения скорости вращения двигателя
Миниатюрный вибрационный двигатель без сердечника с разнесенным сердечникомПри вращении якоря двигателя постоянного тока возникает всплеск электрического напряжения каждый раз, когда щетка перемещается от одного сегмента коммутатора к следующему.Он называется коммутационным пиком и может использоваться для определения скорости вращения двигателя без энкодера. Ссылка на диаграмму ниже может быть полезна для продолжения обсуждения.
Пики коммутации двигателя постоянного токаПики коммутации двигателя постоянного тока
Пик коммутации — это помехи для напряжения питания двигателя из-за быстрого разряда магнитного поля, накопленного в обмотке двигателя. Это происходит, когда щетка разрывает контакт с сектором коммутатора, подключенным к обмотке, находящейся под напряжением.Обычно это необходимо подавить, чтобы избежать электромагнитных помех (EMI) с конденсатором и избежать повреждения переключаемых полупроводников, обычно с обратным диодом.
Количество импульсов на оборот равно удвоенному количеству секторов коммутатора. В случае трехполюсных двигателей генерируется шесть коммутационных пиков на оборот, по три на щетку. Эти выбросы представляют собой проблему для больших двигателей постоянного тока, где электромагнитные помехи вызывают множество проблем, в то время как для очень маленьких двигателей ими можно пренебречь.
Коммутационные пики можно использовать для измерения скорости двигателя. Их можно уловить с помощью осциллографа, а для их считывания с помощью счетчика импульсов обычно требуется фильтр верхних частот. Зная частоту выбросов (Fs) и количество полюсов (P) двигателя, легко вычислить скорость двигателя как: 𝑆𝑝𝑒𝑒𝑑 = 60 × 𝐹𝑠𝑃
В реальном случае, из-за возможных недостатков симметрии коммутатора, предпочтительно измерять период (T) между 2 * P количеством пиков и рассчитывать скорость как: 𝑆𝑝𝑒𝑒𝑑 = 60𝑇
На рисунке выше показан пример этого измерения времени; Показанная форма волны — это напряжение на двигателе.В этом случае двигатель имел 3 полюса, поэтому период был между шестью импульсами коммутации. Все всплески хорошо видны, и, глядя на форму волны напряжения, обычно легко проверить количество полюсов, поскольку каждые 2 * P всплеска форма волны повторяется. 𝑆𝑝𝑒𝑒𝑑 = 600.00872 = 6880𝑅𝑃𝑀
Коллекторные шипы часто намного легче увидеть, когда сопротивление подключено последовательно с двигателем, потому что при использовании регулируемого источника питания он будет пытаться поддерживать постоянное напряжение, сглаживая всплески.Вместо этого сопротивление позволяет напряжению двигателя изменяться в зависимости от тока, протекающего через серию.
Измерение скорости двигателя с использованием коммутационных пиков также полезно для расчета передаточного числа редукторного двигателя постоянного тока. Передаточное число — это соотношение между скоростью двигателя постоянного тока и скоростью выходного вала. Скорость выходного вала можно легко измерить с помощью тахометра, в то время как скорость двигателя можно узнать только по коммутационным пикам или добавлению тахометра к заднему валу (при условии, что он есть!).
2-1-3. Скорость вращения двигателя постоянного тока и противодействующая электродвижущая сила
Рис. 2.6 Двигатель становится генератором Рис. 2.7 Правило правой руки Флемингаe = BLv …… (2.5)
e: Генерируемое напряжение, противодействующее электродвижущей силе
[В] B: Магнитная плотность потока
[ T]
L: Длина провода в поле [м] v:
скорость [м / с] Рис.2.8 Скорость вращения и генерируемое напряжение
(противоэлектродвижущая сила
)
Подключите два двигателя, как показано на рис. 2.6. Подключите миниатюрную лампу к одному из двигателей, а другой двигатель — к источнику питания и проверните двигатель. Загорится миниатюрная лампа.
Из этого эксперимента вы узнаете, что двигатель постоянного тока может генерировать энергию .
Теперь мы перемещаем провод поперек поля со скоростью v, не запитывая двигатель, как показано на рис.2.7 показывает. Узнаем, что в проводе генерируется напряжение е. Сравним это с предыдущим рис. 2.2.
Направление напряжения определяется правилом правой руки Флеминга . Направление тока противоположно направлению тока, показанному на рис. 2.2. Поскольку эта функция снижает ток, она называется противоэлектродвижущей силой. Предполагая, что провод является частью обмотки двигателя, мы можем выразить скорость провода v как v = ωR, обратившись к рис.2.3. Следовательно, противодействующая электродвижущая сила, возникающая в этом проводе, будет выражена в соответствии со следующим уравнением:
е = BLRω …… (2,6)
ω: Скорость вращения [рад / с] R: Радиус поворота [м]
Это означает, что противоэлектродвижущая сила пропорциональна скорости вращения ω.
В случае реального двигателя постоянного тока противоэлектродвижущие силы, действующие на все катушки, объединяются и возникают между клеммами.
Поскольку он также пропорционален скорости вращения, он выражается с помощью постоянной обратной ЭДС K E .
e = K E ω …… (2,7)
e: Напряжение на клеммах двигателя (противоэлектродвижущая сила) [В]
K E : Константа обратной ЭДС [Vs / рад]
ω: Скорость вращения [рад / с]
Когда вы измеряете эту взаимосвязь на реальном двигателе, она образует чистую прямую линию, как показано на рис. 2.8.
Фактически, постоянная противо-ЭДС K E и постоянная крутящего момента K T — это одно и то же, что можно проверить следующим образом:
Предположим, что количество витков катушки равно N, соотношение между генерируемым напряжением e и постоянной обратной ЭДС K E будет следующим:
e = 2RNBLω = K E ω…… (2,8)
Здесь, подставив уравнение (2.7) для K T = 2RNBL уравнения (2.4) и разделив обе части на ω, получим
K T = K E …… (2.9).
Если K T и K E одинаковы для двигателей постоянного тока, что это будет значить?
Проще говоря, это означает, что двигатель — это двунаправленный преобразователь энергии между электричеством и машиной.
Мы можем интерпретировать, что правило левой руки Флеминга рассматривает преобразование энергии в направлении «электричество в машину», коэффициент преобразования которого составляет K T .
Между тем, правило правой руки Флеминга рассматривает его в направлении «машина в электричество», коэффициент преобразования которого будет K E .Таким образом, K T и K E — это одно и то же. Однако в этой книге мы продолжим использовать K T и K E по отдельности, чтобы четко указать направление преобразования.
Важность градиента скорость-крутящий момент при определении размеров двигателя постоянного тока
Градиент скорости / крутящего момента является показателем производительности двигателя.Чем меньше значение, тем мощнее двигатель и, следовательно, тем меньше скорость двигателя изменяется при изменении нагрузки. Он основан на соотношении идеальной скорости холостого хода и идеального крутящего момента при остановке.
Важность градиента скорость-крутящий момент при определении размеров двигателя постоянного токаУоррен Осак | Servo2Go
Градиент скорость-крутящий момент, который часто упускают из виду при определении размеров двигателей постоянного тока.
Градиент скорость-крутящий момент определяется как Δn / ΔM [об / мин / мНм].
Градиент скорости / крутящего момента является показателем производительности двигателя. Чем меньше значение, тем мощнее двигатель и, следовательно, тем меньше скорость двигателя изменяется при изменении нагрузки. Он основан на соотношении идеальной скорости холостого хода и идеального крутящего момента при остановке.
Градиент крутящего момента скорости может считаться мерой мощности двигателя, которая определяется типом и размером двигателя, а не выбранной обмоткой. По сути, это то, насколько падает скорость двигателя на каждый приложенный крутящий момент 1 мНм.
На рисунке выше увеличение момента нагрузки приводит к линейному снижению скорости. Таким образом, становится ясно, что означает Δn / ΔM: это градиент линии скорости-момента.
Содержание и мнения в этой статье принадлежат автору и не обязательно отражают точку зрения RoboticsTomorrow
Servo2Go.com Ltd.
Servo2Go.com — интернет-магазин систем автоматизации и управления движением и их компонентов, включая сервомоторы и приводы, шаговые двигатели и приводы, контроллеры автоматизации и движения, системы позиционирования и приводы, редукторы, муфты, тормоза, энкодеры, тахометры. , Датчики линейного смещения, HMI, ПЛК и встроенные контроллеры.Servo2Go.com — это компания, зарегистрированная по стандарту ISO9001: 2008.
Прочие статьи
Определение константы двигателя при определении размеров двигателя постоянного тока
Одним из наиболее часто игнорируемых параметров двигателей постоянного тока (как щеточных, так и бесщеточных) является Km или постоянная двигателя. Постоянная двигателя (выраженная в км) определяет способность двигателя преобразовывать электрическую мощность в механическую.
Что такое пульсация крутящего момента в серводвигателях
Пульсации крутящего момента должны определяться как функция выходной нагрузки и скорости. Для спецификации нагрузки наиболее разумным параметром номинальной мощности является номинальный тепловой крутящий момент серводвигателя в непрерывном режиме.
Подробнее о Servo2Go.com Ltd.
Комментарии (0)
Эта запись не имеет комментариев.Будьте первым, кто оставит комментарий ниже.
Опубликовать комментарий
Вы должны войти в систему, прежде чем сможете оставлять комментарии. Авторизуйтесь сейчас.
Рекомендуемый продукт
Более 25 лет Polyconn имеет собственные торговые марки и производит продукцию по индивидуальному заказу.
Мы можем производить пневматические шланги и другие пневматические изделия в точном соответствии с вашими требованиями. Наши профессиональные разработки и управление качеством в сочетании с отличным обслуживанием клиентов означают, что Polyconn поставляет высококачественные пневматические компоненты по конкурентоспособным ценам. Разместите свой заказ или свяжитесь с Polyconn для получения дополнительной информации о наших пневматических шлангах, пневматических коллекторах, трубах Duratec® или любых других наших высококачественных пневматических продуктах и компонентах.
Вы так же быстры, как и ваши двигательные нейроны: скорость набора и максимального разряда двигательных нейронов определяет максимальную скорость развития силы у человека — Дель Веккьо — 2019 — Журнал физиологии
Введение
Когда центральной нервной системе требуется максимальная скорость и сила, двигательные нейроны разряжаются с частотами, которые значительно выше по сравнению с длительными сокращениями (до 200 Гц против .10-40 Гц) (Desmedt & Godaux, 1977a; Freund, 1983). Произвольные сокращения силы при максимальной скорости развития силы действительно обеспечивают доступ к максимальной скорости разряда моторных нейронов in vivo у людей (Desmedt & Godaux, 1978; Duchateau & Baudry, 2014). В этих сокращениях нервный импульс к мышце во время начальной фазы двигательной задачи (то есть во время нейромеханической задержки) представляет собой эффект коркового воздействия на двигательные нейроны без афферентной обратной связи, генерируемой сокращающейся мышцей.Во время этих быстрых (взрывных) сокращений упорядоченное рекрутирование сохраняется, но большинство моторных единиц задействуется до увеличения силы (Tanji & Kato, 1973; Büdingen & Freund, 1976; Desmedt & Godaux, 1977b; Van Cutsem et al ). 1998). Известно, что набор и увеличение скорости разряда определяют скорость изменения силы (Desmedt & Godaux, 1977b; Freund, 1983; Enoka & Duchateau, 2017). Однако неизвестно, существует ли обширная изменчивость среди людей (Folland et al .2014) в максимальной скорости развития силы определяется свойствами двигательной единицы. Возникает вопрос: так ли быстры движения человека, как движущиеся мотонейроны?
Недавно было высказано предположение, что максимальная скорость разряда двигательных нейронов может определять скорость развития силы (Duchateau & Baudry, 2014). При электрической стимуляции мышц скорость развития силы сокращения мышцы действительно зависит от частоты стимуляции в мышцах крысы (de Haan, 1998) и человека (Deutekom et al .2000). Более того, после 3 месяцев быстрой баллистической тренировки увеличение скорости развития силы происходит параллельно с увеличением скорости разряда моторных единиц у людей (Van Cutsem et al .1998). Кроме того, старение снижает скорость разряда моторных нейронов и, одновременно, скорость развития силы (Klass et al .2008). Исследования с использованием моделирования, по-видимому, подтверждают связь между скоростью разряда двигательных нейронов и быстрым производством силы, хотя прямых экспериментальных наблюдений этой связи нет (Fuglevand et al .1993; Харвуд и Райс, 2012). Более того, вариабельность поведения двигательных нейронов у разных людей во время максимальной скорости развития силы неизвестна.
Из-за технических проблем с отслеживанием потенциалов действия двигательных единиц во время максимально возрастающей фазы сокращения нервный импульс к мышце во время сокращений с максимальной скоростью развития силы был охарактеризован только для начальной фазы сокращений (действие первых четырех двигательных единиц. потенциалы, ∼40–60 мс) (Desmedt & Godaux, 1977b; Van Cutsem et al .1998; Van Cutsem & Duchateau, 2005) или в исследованиях in vitro при введении тока в двигательные нейроны (Granit et al .1963; Sawczuk et al .1995; Miles et al .2005). Временной ход скорости разряда мотонейронов во время взрывных сокращений неизвестен. Более того, количество двигательных единиц, идентифицированных на каждого субъекта в предыдущих исследованиях, было очень маленьким ( n = 1 или 2) и не репрезентативно для эффективного нервного импульса к мышце.В настоящем исследовании мы оценили нервное движение к мышце во время взрывных сокращений, определив одновременную активность относительно большого количества двигательных нейронов (> 10 на человека). Цель состояла в том, чтобы оценить связь между поведением мотонейронов и способностью к быстрой выработке силы. Мы предположили, что скорость набора и максимальная генерируемая разрядная активность пула мотонейронов будут определять максимальную скорость развития силы у человека.
Методы
Участники и набор
Двадцать здоровых, физически активных мужчин (возраст 24,9 ± 3 года, вес 75,4 ± 8,6 кг, рост 180 ± 10 см, 2636 ± 1298 метаболических эквивалентов мин. –1 недели) добровольно приняли участие в настоящем исследовании, которое было одобрено Комитет по этике Римского университета «Foro Italico» (номер разрешения 44680) и соответствовал стандартам, установленным Хельсинкской декларацией .Добровольцы не страдали нервно-мышечным заболеванием, патологией нижних конечностей или хирургическим вмешательством и не участвовали в каких-либо формах регулярных физических тренировок. Письменное информированное согласие было подписано волонтерами.
Обзор исследования
Волонтеры посетили лабораторию дважды с интервалом в 7 дней. Перед первым визитом привычки участников к физической активности в развлекательном процессе оценивались с помощью Международного вопросника по физической активности (IPAQ, короткий формат).Первое посещение состояло из ознакомительной сессии, включающей как максимальные, так и взрывные произвольные сокращения доминирующей ноги (самооценка). Сокращения состояли из изометрических максимальных произвольных сокращений тыльного сгибания голеностопного сустава (MVC), изометрических коротких пульсирующих сокращений и изометрических сокращений с взрывной силой. Во время второго визита участники повторили ознакомительный сеанс, но с записью электромиографической (ЭМГ) активности с помощью поверхностной электромиографии высокой плотности (HDsEMG) передней большеберцовой мышцы.Участников попросили избегать любых физических упражнений (48 часов) и потребления кофеина (24 часа) перед сессиями тестирования.
Методика эксперимента
Разминка состояла из восьми изометрических субмаксимальных тыльных сгибаний (4 × 50%, 3 × 70%, 1 × 90% воспринимаемой максимальной произвольной силы), каждое из которых было разделено 15 с, и серии коротких пульсирующих сокращений. Во время коротких пульсирующих сокращений добровольцы были проинструктированы сокращаться как можно быстрее до целевой силы 75% от максимальной произвольной силы (MVF) (определенной ниже), отображаемой на экране, и расслабляться сразу после достижения максимальной силы. достигнуто (Van Cutsem et al .1998). Короткие пульсирующие сокращения использовались для максимально быстрого ознакомления участников с развивающейся силой и для подтверждения того, что RFD, измеренная во время взрывных сокращений, используемых для анализа разложения, была максимальной. После разминки испытуемые выполняли изометрические MVC и изометрические максимальные взрывные сокращения. Во время MVC участники получили сильную словесную поддержку и были проинструктированы «толкаться как можно сильнее» в течение 3–5 секунд с отдыхом ≥30 секунд между ними, всего три повторения.Обеспечивалась визуальная обратная связь прилагаемой силы при каждом сокращении и максимальных предыдущих сокращений. Наибольший дорсифлексорный MVF, соответствующий максимальной мгновенной силе во время MVC, был зарегистрирован в цифровом виде. Через 4 мин после завершения MVC добровольцы выполнили 12 изометрических взрывных тыльных сгибаний, которые были разделены на два блока по шесть повторений в каждом. Каждое сокращение отделялось 20-секундным периодом отдыха, а после каждого блока предоставлялся 2-минутный отдых.Добровольцев проинструктировали вытянуть голеностопный сустав «как можно быстрее и сильнее» и выйти за пределы визуального целевого курсора на мониторе, зафиксированного на пороге 75% от их MVF, а затем удерживать силу в течение 3 секунд на такой же уровень достигается во время взрывного сжатия. Взрывные сокращения выполнялись как максимальное создание взрывной силы с последующей фазой удержания для увеличения продолжительности сокращения, как того требует алгоритм разложения для определения достаточного количества независимых источников (потенциалов действия двигательных единиц) на электромиограмме (Holobar et al ). .2014; Негр и др. . 2016). Более того, включение фазы удержания после взрывного усилия позволило проверить подход декомпозиции во время быстрой части сокращения (см. «Анализ ЭМГ высокой плотности»). На начало каждого взрывного сокращения указывает звуковой сигнал. Участников проинструктировали избегать любого встречного движения или предварительного натяжения, и при обнаружении ошибки давалась обратная связь. Автономный анализ подтвердил большое согласие в максимальной скорости развития силы, полученной во время коротких пульсирующих сокращений и взрывных сокращений.
Запись сигнала силы
Жесткий, изготовленный по индивидуальному заказу эргометр голеностопного сустава использовался как в ознакомительном, так и в основном эксперименте (OT Bioelettronica, Турин, Италия) и гарантировал высокую жесткость во время взрывных сокращений. Участники удобно сидели с бедром, согнутым на ~ 120 ° (180 ° = анатомическое положение) на массажном столе, с доминирующим коленом, разогнутым на ~ 180 ° (180 ° = анатомическое положение), а голеностопный сустав — на ~ 100 ° (90 ° = анатомическое положение) подошвенного сгибания.Стопа опиралась на регулируемую подножку и вместе с голеностопом была туго закреплена ремнями на липучке. Ремешок для стопы (шириной ~ 3 см) располагали над дистальной частью плюсневых костей, а ремешок для голеностопного сустава (шириной ~ 3 см) закрепляли на тыльной стороне стопы перпендикулярно большеберцовой кости. Ремешок для стопы располагался последовательно с калиброванным датчиком нагрузки (CCT Transducer s.a.s, Турин, Италия), который располагался перпендикулярно подошвенной поверхности стопы. Аналоговый сигнал силы от тензодатчика усиливался (200 ×) и дискретизировался с частотой 2048 Гц через внешний аналого-цифровой преобразователь (EMG-Quattrocento; OT Bioelettronica, Турин, Италия).Сигнал силы регистрировали с помощью программного обеспечения OTbiolab (OT Bioelettronica), а визуальную обратную связь обеспечивали с помощью Labview, версия 8.0 (National Instruments, Остин, Техас, США).
HDsEMG записей
Было зарегистрированосигналов HDsEMG от передней большеберцовой мышцы с помощью одной полупрозрачной адгезивной сетки из 64 равноотстоящих электродов (13 рядов × 5 столбцов; покрытые золотом; диаметр 1 мм; межэлектродное расстояние 8 мм; OT Bioelettronica). После подготовки кожи (бритье, бережное истирание кожи и очищение 70% этиловым спиртом) были определены оптимальное положение и ориентация матрицы.Для этого опытный оператор пальпировал брюшко большеберцовой мышцы и пометил периметр мышцы хирургической ручкой. Затем на мышцу накладывали адгезивную сетку с помощью двухадгезионных перфорированных слоев пенопласта (SpesMedica, Battipaglia, Италия). Проводящая паста была вставлена в двухадгезивный слой, чтобы гарантировать хороший контакт кожи с электродом (SpesMedica). Сетка покрывала большую часть проксимальной области передней большеберцовой мышцы. Заземляющий электрод помещали на шиловидный отросток локтевой кости руки, а два электрода сравнения располагали на tuberositas tibialis и на медиальной лодыжке доминирующей ноги.Сигналы HDsEMG детектировались в монополярном режиме с частотой дискретизации 2048 Гц, усилены (150 ×) и полосовой фильтрацией (10–500 Гц). Аналоговые сигналы были преобразованы в цифровые данные с помощью многоканального усилителя с разрешением 16 бит (полоса пропускания 3 дБ, 10–500 Гц; EMG-Quattrocento; OT Bioelettronica). Электромиограмма и сигнал силы синхронизировались одной и той же системой сбора данных.
Анализ ЭМГ высокой плотности
Во время автономного анализа монополярные сигналы HDsEMG подвергались полосовой фильтрации с частотой 20–500 Гц (Баттерворт).Сигналы ЭМГ были разложены на потенциалы действия индивидуальных двигательных единиц (MUAP) путем последовательного разделения слепых источников (Holobar & Zazula, 2007). Этот метод и аналогичные подходы были ранее апробированы для широкого диапазона сил передней большеберцовой мышцы и гарантируют высокую точность идентификации последовательности импульсов двигательных единиц (Holobar et al .2014; Negro et al .2016; Del Vecchio и др. .2017; 2018c). Точность разложения оценивалась с использованием отношения импульс / шум (Holobar et al .2014). Все двигательные единицы были вручную проанализированы опытным исследователем, и для анализа были рассмотрены только MUAP с надежной схемой разряда. Двигательные единицы, показывающие отношение импульса к шуму <30 дБ, были исключены из анализа (Holobar et al .2014).
Точность разложения во время взрывных сокращений была дополнительно оценена с помощью дополнительных анализов, необходимых для подтверждения точности во время этих взрывных сокращений. В одном единственном разложении мы сначала разложили три взрывных сокращения с максимальной силой, достигнутой через 150 мс от начала сокращения, из 12 сокращений, выполненных каждым испытуемым.Этот критерий облегчил систематический выбор сокращений как с высокой скоростью развития силы, так и с большим интегралом время-сила, потому что плато кривой зависимости силы от времени происходит до 200 мс от начала силы и, таким образом, хорошо аппроксимирует пик производной и время-сила. площадь. Последовательно мы идентифицировали двигательные единицы, активные во время этих трех взрывных сокращений. В отдельном разложении мы обработали одно из тех же трех сокращений, выбранных случайным образом. Из этого разложения формы сигналов MUAP, идентифицированные слепым разделением источников, использовались в качестве пространственных фильтров для идентификации схем разряда тех же форм сигналов в двух других сокращениях, которые не были разложены.Сравнивая извлеченные двигательные единицы при разложении трех сокращений вместе и по отдельности, мы проверили надежность алгоритма разложения, чтобы идентифицировать одни и те же двигательные единицы в трех сокращениях. Все двигательные единицы с 95% совпадением серий времени разряда считались надежно идентифицированными. Более того, поскольку во время взрывных сокращений начальная скорость разряда двигательных единиц очень высока (до 200 Гц) (рис.1 C ) (Desmedt and Godaux, 1977b; Van Cutsem et al .1998), мы оценили сходство (с помощью кросс-корреляционного анализа) форм волны потенциала действия во время начальной фазы сокращения (первые 20 разрядов моторных единиц) по сравнению с теми, которые были извлечены во время установившегося состояния (с использованием последних 50 моторных единиц). единица разрядов контракции). Поскольку точность разложения во время статических сокращений была подтверждена ранее (Holobar и др. , 2014), сравнение с переходным быстрым нарастанием силы дало еще одно косвенное подтверждение техники во время взрывных сокращений.С этой целью мы вычислили двумерную взаимную корреляцию между разложенными MUAP в двух фазах сокращений (Farina et al .2002; Del Vecchio et al .2017; Martinez-Valdes et al .2018) ).
A , типичный пример времени разряда двигательного нейрона из спинного мозга с результирующей выходной силой. B , двадцать две двигательные единицы были идентифицированы во время взрывного сокращения, нормированного на максимальную произвольную силу (MVF, серым цветом). C , скорость разряда моторных агрегатов, показанная в ( A ). Оранжевая линия соответствует среднему количеству разрядов на двигательную единицу в секунду (в течение временного интервала 35 мс), что является оценкой нервного импульса к мышце.
Из всех идентифицированных двигательных единиц максимальная мгновенная скорость разряда (DR MAX , импульсы в секунду, pps), порог рекрутирования в% MVF и кумулятивные последовательности пиков (Del Vecchio et al .2018г). Временной интервал набора был определен как временной интервал, содержащий первые разряды всех идентифицированных двигательных единиц. Наконец, скорость набора была определена как обратная величина периода набора, что соответствовало среднему количеству идентифицированных единиц, которые были набраны в секунду. Важно отметить, что приведенные выше определения для характеристики вербовки относятся к выборке идентифицированных моторных единиц, а не ко всем рекрутируемым единицам.
Кумулятивная последовательность пиковых импульсов была получена путем суммирования времени разряда идентифицированных моторных единиц. Кумулятивная последовательность спайков анализировалась на временных интервалах продолжительностью 35 мс. Эта длительность интервала была выбрана потому, что она приблизительно соответствовала нейромеханической задержке (см. Результаты) и, таким образом, позволяла анализировать нервный импульс до генерации силы. Окно анализа 35 мс было смещено во времени с шагом 1 мс в общем диапазоне 250 мс от начала активности двигательных единиц.Анализ был ограничен 250 мс, потому что большинство изменений в скорости развития силы во время изометрических взрывных сокращений происходит до ~ 150 мс после начала силы (Del Vecchio et al .2018b). В каждом интервале 35 мс общее количество разрядов в кумулятивной последовательности пиков было разделено на количество активных моторных единиц и на продолжительность окна (35 мс), что дает среднее количество разрядов на моторную единицу в секунду (DR MEAN ). Этот показатель является оценкой силы нервного импульса к мышце (Del Vecchio et al .2018г). На рисунке 1 показан пример этого анализа, который извлекает мгновенное и среднее количество разрядов на двигательную единицу в секунду (как объяснено выше), полученные во время взрывного сокращения.
Чтобы глобально охарактеризовать амплитуду сигнала ЭМГ, среднеквадратичное значение было вычислено из одной биполярной записи, полученной из сигналов HDsEMG. В частности, два набора из пяти соседних монополярных сигналов в центральной части HDsEMG (столбцы 2–4 и строки 4–7 двумерного массива) были усреднены и дифференцированы для получения биполярного вывода ЭМГ с эквивалентным межэлектродным расстоянием 1 .6 см (Del Vecchio et al .2017, 2018a). По этому сигналу оценивали среднеквадратичное значение в те же временные интервалы, которые использовались для оценки свойств двигательных единиц. Наконец, среднеквадратичное значение также было нормализовано к максимальному значению, полученному при максимальной произвольной силе (то есть период времени 100 мс с центром в MVF во время MVC).
Анализ сигнала силы
Во время автономного анализа сигнал силы был преобразован в ньютоны (Н), а смещение силы скорректировано по гравитации.Сокращения, которые демонстрировали предварительное натяжение или встречное движение (базовая сила ≥0,5 Н за 150 мс до начала силы), были исключены. Сигнал силы фильтровался с помощью фильтра нижних частот с нулевым запаздыванием и частотой среза 400 Гц. Эта большая полоса пропускания гарантирует высокую точность при визуальном определении начала силы (Тиллин и др. .2013). Начало действия силы было визуально идентифицировано опытным исследователем с использованием проверенной методологии, как описано ранее (Tillin et al .2010). После определения возникновения силы сигнал был отфильтрован нижними частотами с частотой 20 Гц с помощью фильтра Баттерворта третьего порядка с нулевым запаздыванием. Этот тип фильтра устраняет высокочастотный шум и гарантирует выход неискаженной силы по сравнению с исходным сигналом (Del Vecchio et al .2018b). Из взрывных сокращений, выполненных каждым испытуемым и без начального напряжения, для полного анализа были выбраны только три сокращения с максимальной силой через 150 мс от начала силы, как описано ранее.Для этих трех сокращений сигнал силы анализировался в интервале 250 мс после начала силы. Для каждого перекрывающегося временного интервала от начала действия силы затем вычислялась первая производная силы [т.е. RFD 0 (начало) до «X» мс, где «X» варьировалось в диапазоне 1-250 мс] для определения максимальной скорости развития силы (RFD0-X MAX, Н с –1 ). RFD также был рассчитан для конкретных периодов времени от начала усилия до 60 (RFD0-60) и до 100 (RFD0-100) мс, потому что предыдущие исследования предполагали более сильный вклад нервной системы во время этой фазы сокращения (∼0–100 мс) (de Ruiter и др. .2007; Фолланд и др. . 2014), а также исследовать фиксированные / согласованные периоды времени для всех участников. Более того, интеграл зависимости силы от времени, а именно импульс (Н * с), был рассчитан в интервале от начала силы до 250 мс и, таким образом, отражал всю временную историю сокращения. Поскольку импульс пропорционален изменению количества движения (масса × изменение скорости), он напрямую связан с изменением скорости и, следовательно, скоростью тыльного сгибания голеностопного сустава, если ступня не удерживалась динамометром (Aagaard et al .2002). Помимо переменных абсолютной взрывной силы (RFD, импульс), относительные меры отражают способность участников быстро выражать свою доступную силу силы (MVF) во время нарастающей фазы сокращения (т.е. RFD / импульс, нормализованный к MVF) (Folland et al 2014; Дель Веккио и др. .2018b).
Статистический анализ
Тест Шапиро – Уилка показал нормальное распределение всех извлеченных переменных.Поправка Бонферрони использовалась при тестировании множественных корреляций. DR MAX и DR MEAN (далее называемые нейронными переменными) были проанализированы в отношении абсолютных и нормированных значений силы (RFD0-X MAX , RFD0-60, RFD0-100 и Impulse). Скорость набора двигательных единиц изучалась как функция оценок нейронного влечения и взрывной силы. Начальные значения и последовательные значения нейронных оценок оценивались как функция значений силы с множественными корреляциями.Пороги рекрутирования моторных единиц анализировали как функцию средней скорости разряда моторных единиц и скорости развития силы. Затем исследовали скорость развития силы в течение первых 60 и 100 мс в зависимости от импульса. Сила нервного импульса к мышце, оцениваемая как среднее количество разрядов в единицу в секунду, сравнивалась между первыми 60 мс сокращения и частью со стабильной силой сокращения с парным тестом t . Формы сигналов потенциалов действия двигательных единиц между сокращениями и внутри них оценивались с помощью двумерной функции взаимной корреляции (xcorr2, MATLAB 2017; MathWorks Inc., Натик, Массачусетс, США). Коэффициент вариации (стандартное отклонение совокупности, деленное на среднее значение) оценивался для силы и межимпульсного интервала разряда моторного блока. Для оценки силы двумерных корреляций использовалась корреляция «произведение-момент» Пирсона. P <0,05 считалось статистически значимым. Данные представлены как среднее ± стандартное отклонение.
Результаты
Сила
На рис. 1 показана кривая время-сила для репрезентативного объекта, а на рис.2 показаны переменные взрывной силы для каждого испытуемого. Каждый цвет на рис. 2 представляет отдельный объект. Максимальная скорость развития силы имела межсубъектный коэффициент вариации 30,0% и 19,2% для абсолютного и нормализованного RFD0-XMAX, соответственно. Импульс (0–250 мс) имел коэффициент вариации 24,4% и 12,4% для абсолютных и нормализованных значений соответственно. Максимальная изометрическая произвольная сила варьировалась от 166,72 до 364,88 Н у разных субъектов, в среднем 278.10 ± 58,34 Н и коэффициент вариации 20,0%. Максимальная произвольная сила сильно коррелировала с RFD MAX и Impulse ( r 2 = 0,62 ± 0,12; Pearson, P <0,001).
Каждый цвет соответствует определенной теме. A , кривая сила-время в ньютонах (Н). B , интеграл сила-время. C , нормированные значения максимальной произвольной силы (%). D , интеграл сила-время от нормированных значений. E и F , максимальная скорость развития силы (RFD0-X MAX ) до наивысшего градиента от начала до каждой точки вверх по восходящей кривой в абсолютном и нормализованном (к MVF) терминам. Пик максимальной скорости развития силы обратно коррелировал со временем. Приведены значения коэффициентов корреляции ( r 2 ) и P . ** P <0,001
Задержка между первым обнаруженным потенциалом действия двигательной единицы и началом произвольной силы (т.е.е. нейромеханическая задержка) составила 42,4 ± 17 мс.
Подтверждение анализа моторного блока
Для анализа были выбраны только двигательные единицы, показывающие надежные схемы разряда с отношением импульса к шуму более 30 дБ (Holobar и др. , 2014). Общее количество разложившихся моторных единиц составило 242, по 12,1 ± 5,7 на одного человека. На рисунке 1 показаны идентифицированные моменты разряда моторного блока во время типичного сокращения взрывной силы.Кривые MUAP были взаимно коррелированы между сокращениями и внутри них. Корреляция внутри сокращения представляет собой степень сходства MUAP первых 20 разрядов по сравнению с первыми 50 разрядами во время фазы установившейся силы (Рис. 3 C ). Средний двумерный коэффициент корреляции между испытуемыми в этом сравнении составил r = 84,3 ± 8,0%. Время разряда типичного моторного блока и соответствующие формы сигналов MUAP показаны на рис.3 А — С . Когда совокупность идентифицированных двигательных единиц была взаимно коррелирована по трем взрывным сокращениям (рис. 3 B — D ), средний коэффициент корреляции (средний по всем предметам) составил 88,4 ± 3,0%. Схема разряда и расчетные формы волны потенциала действия были очень похожи при сравнении трех максимальных взрывных сокращений (пример показан на рис. 3 D ). Двумерная корреляция была также оценена для случайно выбранных двигательных единиц между каждым сокращением, и расчетное значение было очень низким (30.7 ± 7,4%).
A и B , три максимальных сокращения взрывной силы (серые линии). Каждый цвет представляет одну и ту же двигательную единицу, отслеживаемую во время этих сокращений. Последовательность импульсов двигательных единиц была идентифицирована методом слепого разделения источников на поверхностной электромиограмме высокой плотности. C , время разгрузки моторного блока 1 в ( A ) (соответствующее красному кружку с белой заливкой) использовалось в качестве триггеров для извлечения сигнатуры моторного блока, показанной в ( C ).В этом примере сигнатуры были извлечены с помощью пикового сигнала, усредняющего первые 20 разрядов (выделены зеленым цветом). Затем форму волны потенциала действия коррелировали с сигнатурой, извлеченной из последних 50 разрядов (во время плато, выделены красным цветом) взрывного сокращения. D , сигнатура моторного блока 5 (черный кружок с белой заливкой) в ( A ) коррелировала по трем сокращениям. Можно отметить высокую степень сходства между потенциалом действия двигательных единиц внутри сокращений и между ними.
Приведенный выше анализ проверки указывает на высокоточное разложение во время быстрой фазы взрывных сокращений.
Нейронный драйв и сила
Фигуры 1 B — C и 3 показывают время разряда, полученное в результате анализа разложения во время изометрических взрывных сокращений для двух репрезентативных субъектов. Среднее нервное возбуждение у всех испытуемых показано на рис. 4. Характер разряда был сходным для всех идентифицированных двигательных единиц (рис. 1 и 3).Средний порог набора по всем предметам составил 2,10 ± 2,46% MVF. Классическая схема «луковая кожа» (обратная зависимость порогов рекрутирования двигательных единиц и скорости стрельбы), которая обычно наблюдается во время контролируемых изометрических силовых сокращений при малых усилиях (De Luca & Erim, 1994), не наблюдалась во время взрывных сокращений (рис.1 и 2). ). Действительно, средняя скорость задействования идентифицированных моторных единиц была чрезвычайно высокой (6,48 ± 4,74 мс, т.е. в среднем одна моторная единица задействовалась каждые 6.48 мс), что указывает на полное задействование идентифицированных двигательных единиц в пределах 54,3 ± 30,8 мс. Из-за очень быстрого набора скорость разряда во время сокращения для первой и последней задействованных двигательных единиц не различалась (42,85 ± 10,19 против . 41,55 ± 11,58 pps; парный тест t , P = 0,57). Следовательно, связь между порогами рекрутирования двигательных единиц и DR MEAN (либо во время нейромеханической задержки, либо усредненной во время сокращения) не была значимой ( r 2 = 0.09, P > 0,05).
Среднее количество разрядов на двигательную единицу в секунду, которое является оценкой нервного импульса к мышце (DR MEAN , pps) и взрывных сокращений (в процентах от максимальной произвольной силы) при усреднении по испытуемым. Пунктирные линии соответствуют среднему значению, а края заштрихованного графика указывают SD. Можно отметить пик нервного возбуждения, соответствующий начальной фазе сокращения взрывной силы.
Максимальная скорость разряда моторных единиц (DR MAX ) среди всех моторных единиц всех участников колебалась от 8,56 до 227,6 pps. Сила нервного импульса к мышце со временем уменьшалась (рис. 4) и была значительно выше во время начальной фазы сокращения по сравнению с плато взрывного сокращения (в пределах нейромеханической задержки, 43,23 ± 8,69 против . Силы. плато 33,40 ± 7,71; парный тест t , P <0.001) (рис.3).
Максимальная мгновенная скорость разряда и сила нервного импульса в первые 35 мс сокращения хорошо объясняют способность генерировать взрывную силу. И абсолютные, и относительные значения RFD0-X MAX и Impulse действительно сильно коррелировали с DR MAX в течение этого начального интервала 35 мс (среднее по абсолютным и нормализованным значениям RFD, r 2 = 0,64 ± 0,13; Pearson, П <0.0001) (рис.5). Аналогичным образом, DR MEAN в течение этого начального периода предсказал как абсолютные, так и нормализованные значения RFD0-X MAX (среднее по абсолютным и нормализованным значениям RFD r 2 = 0,62 ± 0,09; Pearson, P <0,001 ) (Рис.5). Корреляция с RFD за фиксированные периоды времени (60 и 100 мс) также сильно коррелировала с максимальной мгновенной скоростью разряда и средним числом разрядов на единицу двигателя в секунду (среднее значение по абсолютным и нормализованным значениям RFD0-60 / 100 мс, r 2 = 0.68 ± 0,05; P <0,001).
A и B , нормализованный и абсолютный интеграл сила-время (импульс, от начала до 250 мс) по отношению к максимальной мгновенной скорости разряда, которая была получена в первые 35 мс активности двигательных единиц. Каждый цвет представляет один предмет. C и D , среднее количество разрядов на двигательную единицу в секунду в течение первых 35 мс активности двигательной единицы (DR MEAN ) по отношению к абсолютной и нормализованной максимальной скорости развития силы (RFD0-X MAX ).RFD0-X MAX представляет собой пик производной силы. E и F , максимальная скорость разряда мотонейронов в зависимости от скорости развития силы от начала до 100 мс (RFD0-100). G , интеграл силы времени (Импульс, Н * с) при построении графика как функция скорости набора моторных единиц (моторные единицы s –1 ). H , связь между максимальной скоростью разряда моторных нейронов (DR MAX ) и скоростью набора моторных единиц (моторные единицы s –1 ).Скорость набора двигательных единиц соответствует среднему количеству идентифицированных двигательных единиц в секунду. r 2 показаны значения для каждого отношения. *** P <0,0001.
Интересно, что ни одна из нейронных переменных во временных интервалах после первых 40 мс активности двигательного нейрона не предсказала оценки взрывной силы (Pearson, P > 0,05). Это указывает на то, что взрывная сила определялась исключительно первоначальным всплеском активности двигательных нейронов, произошедшим до генерации силы.
Скорость набора идентифицированных двигательных единиц значимо коррелировала с нормализованным и абсолютным Импульсом и RFD0-X MAX ( r 2 = 0,40 ± 0,06; P <0,05) (Рис. 5 E ). Эта корреляция указывает на то, что субъекты с большим производством взрывной силы задействовали двигательные единицы в более короткие промежутки времени (более быстрое задействование). Более того, скорость набора значительно коррелировала с DR MEAN и DR MAX ( r 2 = 0.54 ± 0,1; Pearson, P <0,05) (рис. 5 F ), что указывает на то, что у субъектов с высокой скоростью разряда также было более быстрое рекрутирование двигательных единиц. Например, у субъекта с наивысшей нормализованной скоростью развития силы (и скоростью разряда) временной интервал набора составлял ∼3 мс, что примерно в пять раз короче, чем у субъекта с наименьшим значением RFD0-X MAX ( ∼16 мс).
Абсолютная и нормализованная амплитуда ЭМГ (в тех же временных интервалах, которые использовались для нейронного привода) не коррелировали с RFD0-X MAX (в среднем r 2 = 0.38 ± 0,32; Pearson, P > 0,05). Более того, ни абсолютная, ни нормализованная ЭМГ не были достоверно коррелированы с какими-либо измерениями взрывной силы ( r 2 <0,24; Pearson, P > 0,05).
Обсуждение
Мы исследовали поведение относительно большой популяции мотонейронов во время быстрых (взрывных) сокращений. Мы впервые показываем, что как скорость набора, так и скорость разряда мотонейронов диктуют вариабельность скорости развития силы у человека.Более того, результаты настоящего исследования предполагают, что максимальная скорость развития силы связана с корковым возбуждением, полученным мотонейронами до того, как сгенерируются сила и связанная с ней афферентная обратная связь.
Нервное движение к мышцам и максимальная скорость развития силы
Скорость разряда мотонейронов была значительно выше в течение первых 35 мс активности, чем в последующий временной интервал (рис. 1-3).Поскольку начальная фаза задачи с прямой связью отражает только эфферентное побуждение, разрядная активность моторных единиц представляет собой преобразование коркового входа моторных нейронов. Большинство мотонейронов начали разряжаться до увеличения силы (рис. 1 и 2). Активность верхних мотонейронов определяет ответ «все или ничего» нижних мотонейронов; таким образом, более быстрое рекрутирование нейронов в коре головного мозга может быть механизмом, приводящим к более сжатому рекрутированию спинномозговых мотонейронов для субъектов, достигающих более высокой скорости развития силы.
Основные факторы, определяющие широкий диапазон максимальной скорости разряда двигательных нейронов у субъектов, неизвестны. Некоторые субъекты достигли частоты в единичных двигательных единицах более 160 импульсов в секунду, при этом один субъект достиг частоты 200 импульсов в секунду и импульса силы почти в два раза по сравнению с субъектами с двигательными нейронами, разряжающимися на скорости <100 импульсов в секунду (рис. 4). Эти различия могут быть определены внутренними характеристиками двигательного нейрона и / или кортикоспинальной входной силой.
Связь между средними разрядами на двигательную единицу в секунду и скоростью набора двигательных нейронов показывает передачу коркового сигнала пулом двигательных нейронов. Когда центральной нервной системе требуется максимальная скорость, она проецирует сильный синаптический сигнал на весь пул мотонейронов, определяя как быстрое вовлечение, так и высокую скорость разряда. Было высказано предположение, что рекрутирование моторных единиц не может быть определяющим фактором максимальной силы прямой связи (Duchateau & Baudry, 2014).Однако мы заметили, что большее количество разрядов на двигательную единицу в секунду связано с более быстрым привлечением двигательных единиц и, следовательно, с большей максимальной скоростью развития силы. Можно утверждать, что более распределенный общий вход в двигательные нейроны может способствовать увеличению синхронизации двигательных единиц и скорости развития силы (Semmler, 2002). Однако связь между синхронизацией двигательных единиц и скоростью развития силы может быть не очень сильной (Farina & Negro, 2015).
Генерируемая взрывная сила определялась быстрым увеличением синаптического входа в двигательные нейроны, который определял как быстрое рекрутирование, так и высокую скорость разряда. Эти два механизма нельзя разделить, потому что оба зависят от входа в пул мотонейронов. Эта характеристика двигательных нейронов наблюдалась также в исследованиях in vitro при введении высоких токов в двигательный нейрон (Гранит и др. . 1963). Начальная скорость разряда мотонейрона связана с силой подаваемого тока (Гранит и др. .1963). Сила кортикоспинальных входов, необходимых для взрывной силы, по-видимому, определяет высокую начальную скорость разряда мотонейронов. Нелинейное снижение скорости разряда, наблюдаемое в настоящем исследовании, хорошо согласуется с адаптацией частоты спайков, наблюдаемой in vitro в отдельных двигательных нейронах (Granit et al .1963; Sawczuk et al . 1995), что связано с с инактивацией проводимости Na + (Miles et al .2005). Sawczuk и др. . (1995) показали, что адаптация мотонейронов крыс к частоте спайков следует за быстрым снижением скорости разряда, за которым следует линейное и экспоненциальное снижение. Взятые вместе, эти результаты предполагают, что кортикоспинальная входная сила определяет человеческую изменчивость взрывной силы. Более того, они показывают строгое соответствие между результатами in vitro, и in vivo, , с предлагаемой в настоящее время методикой.
Недавно скорость набора двигательных единиц оценивалась косвенно через скорость проводимости мышечных волокон (Andreassen & Arendt-Nielsen, 1987; Del Vecchio et al .2017) во время взрывных сокращений в группе контрольных и хронических силовых тренировок (Del Vecchio et al .2018b). Скорость проводимости мышечных волокон была связана с максимальной скоростью развития силы в обеих группах, но только при раннем нарастании силы (первые 50 мс). Эти данные подтверждают прямую связь между скоростью набора двигательных единиц и скоростью развития силы, о которой сообщается в настоящем исследовании, и дополнительно подчеркивают важность сжатия диапазона набора двигательных единиц как можно быстрее (Del Vecchio et al .2018b).
Феномен луковой кожи, который обычно наблюдается во время медленно увеличивающихся сокращений рампы (De Luca & Erim, 1994), не наблюдался в настоящем исследовании ни во время нейромеханической задержки, ни, что более интересно, в устойчивой фазе взрывной задачи ( Рис 1 и 2). Это наблюдение связано со сжатым набором мотонейронов и высокой скоростью развития силы. Можно возразить, что кожица лука зависит от медленной выработки силы.Очень короткий интервал набора указывает на возможность того, что кожица лука во время медленных силовых сокращений может частично определяться афферентной обратной связью с мотонейронами.
Интересно отметить, что относительные и абсолютные значения взрывной силы коррелировали с нейронными оценками, полученными только в течение первых 35 мс с начала действия первого обнаруженного потенциала действия двигательной единицы. Это указывает на то, что именно начальный нервный импульс, посылаемый мышцам, влияет на ход взрывного сокращения.Таким образом, нервные и сократительные факторы, которые, как было установлено, влияют на производство взрывной силы (Folland et al .2014), могут быть внутренне связаны. Взаимосвязь между абсолютной взрывной силой и нервным импульсом может лежать в основе связи между нервным стимулом и адаптацией сократительных свойств мышечных волокон. Обычно наблюдается, что нервная активация действительно влияет на адаптацию мышечных волокон (Dubowitz, 1967; Del Vecchio et al .2018c). Хотя мы не измеряли сократительные свойства волокон в настоящем исследовании, нервные детерминанты абсолютной скорости развития силы также могут быть связаны с соответствующими различиями в сократимости волокон, вызванными нервной активацией.
В настоящем исследовании мы выявили полную связь между максимальной скоростью набора и разрядки мотонейронов и взрывными сокращениями передней большеберцовой мышцы человека. Интересно, что предложенная методика показала высокую достоверность при идентификации одной и той же единицы на разных этапах роста мышечной силы.Настоящий результат впервые показывает стратегии, используемые центральной нервной системой для достижения максимальной скорости развития силы. Предлагаемый методологический подход к разложению HDsEMG может быть использован неинвазивно для проверки максимальной скорости разряда моторных нейронов, что позволяет исследовать хронические и острые изменения нервной и мышечной функции. Результаты настоящего исследования показывают, что корковые сигналы, полученные мотонейронами до того, как сила будет генерироваться, диктуют наш потенциал для быстрой генерации силы.
Дополнительная информация
Конкурирующие интересы
Авторы заявляют, что у них нет конкурирующих интересов.
Вклад авторов
Все авторы внесли свой вклад в концепцию и дизайн работы. ADV и AC получили данные. ADV, FN, AH и DF проанализировали данные. ADV разработал рукопись и подготовил рисунки. Все авторы внесли свой вклад в интерпретацию результатов и в редакцию рукописи.Все авторы одобрили окончательную версию представленной рукописи для публикации и несут ответственность за все аспекты работы. Все лица, обозначенные как авторы, имеют право на авторство, и все, кто имеет право на авторство, перечислены.
Финансирование
Эта работа финансировалась Proof-of-Concept Project Interspine (737570) и Словенским исследовательским агентством (проект J2-7357 — Точная количественная оценка стратегий мышечного контроля и моделей коактивации в роботизированной реабилитации пациентов с гемипаретическим синдромом, а также финансирование программы P2- 0041).